Download this notebook from github.
Advanced explanation for RCM
Contrary to Sentinel-1, Radarsat Constellation Mission doesn’t have the notion of multi dataset
[1]:
import xsar
import geoviews as gv
import holoviews as hv
import geoviews.feature as gf
hv.extension('bokeh')
path = xsar.get_test_file('RCM1_OK1050603_PK1050605_1_SC50MB_20200214_115905_HH_HV_Z010')
/home/datawork-cersat-public/cache/project/mpc-sentinel1/workspace/mamba/envs/testgeoviewsnumpy/lib/python3.11/site-packages/dask/dataframe/__init__.py:42: FutureWarning:
Dask dataframe query planning is disabled because dask-expr is not installed.
You can install it with `pip install dask[dataframe]` or `conda install dask`.
This will raise in a future version.
warnings.warn(msg, FutureWarning)


[2]:
import warnings
warnings.filterwarnings('ignore')
Access metadata from a product
Raw information is stocked in different files such as tiff ones (for digital numbers). A file named product.xml is constitued of the main information (geolocation grid, orbit attitude, noise look up tables…). Calibration look up tables are located in xml files. All the useful data is grouped in a datatree thanks to dependencie xarray-safe-rcm. This datatree is than used as an attribute of RcmMeta.
[3]:
#Instanciate a RadarSat2Meta object
meta = xsar.RcmMeta(name=path)
[4]:
#Access the datatree extracted from the reader
meta.dt
[4]:
<xarray.DatasetView> Size: 0B
Dimensions: ()
Data variables:
*empty*
Attributes:
copyright: RCM Data and Products (c) CSA, 2020 - All Rights...
productId: 1050605_1
documentIdentifier: RCM-SP-53-0419, Issue 2/5
securityClassification: Non classifié / Unclassified- beam: 8
- pole: 2
- burst: 24
- beam(beam)<U5'SC-10' 'SC-3' ... 'SC-8' 'SC-9'
array(['SC-10', 'SC-3', 'SC-4', 'SC-5', 'SC-6', 'SC-7', 'SC-8', 'SC-9'], dtype='<U5') - pole(pole)<U2'HH' 'HV'
array(['HH', 'HV'], dtype='<U2')
- burst(burst)int640 1 2 3 4 5 ... 617 618 619 620 621
array([ 0, 1, 2, 3, 4, 5, 6, 7, 102, 105, 358, 359, 360, 362, 363, 364, 365, 615, 616, 617, 618, 619, 620, 621])
- rawLine(beam, pole, burst)float64nan nan nan nan ... nan nan nan nan
array([[[ nan, nan, nan, nan, nan, nan, nan, 1222., nan, nan, nan, 63218., nan, nan, nan, nan, nan, 108306., nan, nan, nan, nan, nan, nan], [ nan, nan, nan, nan, nan, nan, nan, 1222., nan, nan, nan, 63218., nan, nan, nan, nan, nan, 108306., nan, nan, nan, nan, nan, nan]], [[ 0., nan, nan, nan, nan, nan, nan, nan, nan, nan, nan, nan, 63405., nan, nan, nan, nan, nan, 108493., nan, nan, nan, nan, nan], [ 0., nan, nan, nan, nan, nan, nan, nan, nan, nan, nan, nan, 63405., nan, nan, nan, nan, nan, 108493., nan, nan, nan, nan, nan]], [[ nan, 159., nan, nan, nan, nan, nan, nan, nan, 18476., nan, nan, nan, nan, ... nan, 64067., nan, nan, nan, nan, nan, nan, 109155., nan]], [[ nan, nan, nan, nan, nan, 849., nan, nan, nan, nan, nan, nan, nan, nan, nan, nan, 64254., nan, nan, nan, nan, nan, nan, 109342.], [ nan, nan, nan, nan, nan, 849., nan, nan, nan, nan, nan, nan, nan, nan, nan, nan, 64254., nan, nan, nan, nan, nan, nan, 109342.]], [[ nan, nan, nan, nan, nan, nan, 1022., nan, 17930., nan, 63018., nan, nan, nan, nan, nan, nan, nan, nan, nan, nan, nan, nan, nan], [ nan, nan, nan, nan, nan, nan, 1022., nan, 17930., nan, 63018., nan, nan, nan, nan, nan, nan, nan, nan, nan, nan, nan, nan, nan]]]) - pulseRepetitionFrequency(beam, pole, burst)float64nan nan nan nan ... nan nan nan nan
- units :
- Hz
array([[[ nan, nan, nan, nan, nan, nan, nan, 2488.80039821, nan, nan, nan, 2490.03984064, nan, nan, nan, nan, nan, 2491.28051819, nan, nan, nan, nan, nan, nan], [ nan, nan, nan, nan, nan, nan, nan, 2488.80039821, nan, nan, nan, 2490.03984064, nan, nan, nan, nan, nan, 2491.28051819, nan, nan, nan, nan, nan, nan]], [[2782.41513634, nan, nan, nan, nan, nan, nan, nan, nan, nan, nan, nan, 2783.96436526, nan, nan, nan, nan, nan, 2785.51532033, nan, nan, nan, nan, nan], [2782.41513634, nan, nan, nan, ... nan, nan, nan, 2507.5225677 ], [ nan, nan, nan, nan, nan, 2505.01002004, nan, nan, nan, nan, nan, nan, nan, nan, nan, nan, 2506.26566416, nan, nan, nan, nan, nan, nan, 2507.5225677 ]], [[ nan, nan, nan, nan, nan, nan, 2765.48672566, nan, 2767.01715551, nan, 2768.54928018, nan, nan, nan, nan, nan, nan, nan, nan, nan, nan, nan, nan, nan], [ nan, nan, nan, nan, nan, nan, 2765.48672566, nan, 2767.01715551, nan, 2768.54928018, nan, nan, nan, nan, nan, nan, nan, nan, nan, nan, nan, nan, nan]]])
<xarray.DatasetView> Size: 7kB Dimensions: (beam: 8, pole: 2, burst: 24) Coordinates: * beam (beam) <U5 160B 'SC-10' 'SC-3' ... 'SC-8' 'SC-9' * pole (pole) <U2 16B 'HH' 'HV' * burst (burst) int64 192B 0 1 2 3 4 ... 618 619 620 621 Data variables: rawLine (beam, pole, burst) float64 3kB nan nan ... nan pulseRepetitionFrequency (beam, pole, burst) float64 3kB nan nan ... nanprfInformation- beams: 8
- polarizations: 2
- pulses: 8
- beam: 8
- pole: 2
- beams(beams)<U5'SC-3' 'SC-4' ... 'SC-9' 'SC-10'
array(['SC-3', 'SC-4', 'SC-5', 'SC-6', 'SC-7', 'SC-8', 'SC-9', 'SC-10'], dtype='<U5') - polarizations(polarizations)<U2'HH' 'HV'
array(['HH', 'HV'], dtype='<U2')
- pulses(pulses)<U6'250036' '220030' ... '150036'
array(['250036', '220030', '190030', '175034', '175034', '160036', '150030', '150036'], dtype='<U6') - beam(beam)<U5'SC-10' 'SC-3' ... 'SC-8' 'SC-9'
array(['SC-10', 'SC-3', 'SC-4', 'SC-5', 'SC-6', 'SC-7', 'SC-8', 'SC-9'], dtype='<U5') - pole(pole)<U2'HH' 'HV'
array(['HH', 'HV'], dtype='<U2')
- pulsesReceivedPerDwell(beam)int64185 159 158 172 171 185 172 197
array([185, 159, 158, 172, 171, 185, 172, 197])
- numberOfPulseIntervalsPerDwell(beam)int64199 171 170 185 184 199 185 212
array([199, 171, 170, 185, 184, 199, 185, 212])
- burstDelay()float645.36e-05
- units :
- us
array(5.36e-05)
- rank(beam)int6414 12 12 13 13 14 13 15
array([14, 12, 12, 13, 13, 14, 13, 15])
- settableGain(beam, pole)float64-18.9 -19.7 -18.9 ... -18.9 -19.7
- units :
- dB
array([[-18.9, -19.7], [-18.9, -19.7], [-18.9, -19.7], [-18.9, -19.7], [-18.9, -19.7], [-18.9, -19.7], [-18.9, -19.7], [-18.9, -19.7]]) - radarCenterFrequency()float645.405e+09
- units :
- Hz
array(5.405e+09)
- pulseLength(beam)float643.6e-05 3.6e-05 ... 3.6e-05 3e-05
- units :
- s
array([3.6e-05, 3.6e-05, 3.0e-05, 3.0e-05, 3.4e-05, 3.4e-05, 3.6e-05, 3.0e-05]) - pulseBandwidth(beam)float641.5e+07 2.5e+07 ... 1.6e+07 1.5e+07
- units :
- Hz
array([15000000., 25000000., 22000000., 19000000., 17500000., 17500000., 16000000., 15000000.]) - samplingWindowStartTimeFirstRawLine(beam, pole)float648.1e-05 8.1e-05 ... 6.4e-05 6.4e-05
- units :
- s
array([[8.100e-05, 8.100e-05], [1.044e-04, 1.044e-04], [7.720e-05, 7.720e-05], [8.640e-05, 8.640e-05], [8.620e-05, 8.620e-05], [7.400e-05, 7.400e-05], [8.940e-05, 8.940e-05], [6.400e-05, 6.400e-05]]) - samplingWindowStartTimeLastRawLine(beam, pole)float647.92e-05 7.92e-05 ... 6.3e-05
- units :
- s
array([[7.920e-05, 7.920e-05], [1.034e-04, 1.034e-04], [7.620e-05, 7.620e-05], [8.560e-05, 8.560e-05], [8.500e-05, 8.500e-05], [7.300e-05, 7.300e-05], [8.780e-05, 8.780e-05], [6.300e-05, 6.300e-05]]) - numberOfSwstChanges(beam, pole)int643 3 3 3 2 2 3 3 3 3 3 3 3 3 3 3
array([[3, 3], [3, 3], [2, 2], [3, 3], [3, 3], [3, 3], [3, 3], [3, 3]]) - adcSamplingRate(beam)float641.654e+07 2.688e+07 ... 1.654e+07
- units :
- Hz
array([16538461.53846154, 26875000. , 23888888.88888889, 21500000. , 19545454.54545455, 19545454.54545455, 17916666.66666667, 16538461.53846154]) - samplesPerEchoLine(beam)int644578 5053 4754 ... 4781 4619 4330
array([4578, 5053, 4754, 4610, 4535, 4781, 4619, 4330])
- acquisitionType :
- Medium Resolution 50m
- antennaPointing :
- Right
- zeroDopplerSteeringFlag :
- ZeroDopplerSteeringOn
- satOrientationRefFrame :
- Geocentric
- rawBitsPerSample :
- 3
- steppedReceiveMode :
- True
<xarray.DatasetView> Size: 2kB Dimensions: (beams: 8, polarizations: 2, pulses: 8, beam: 8, pole: 2) Coordinates: * beams (beams) <U5 160B 'SC-3' ... 'SC-10' * polarizations (polarizations) <U2 16B 'HH' 'HV' * pulses (pulses) <U6 192B '250036' ... '150036' * beam (beam) <U5 160B 'SC-10' ... 'SC-9' * pole (pole) <U2 16B 'HH' 'HV' Data variables: (12/13) pulsesReceivedPerDwell (beam) int64 64B 185 159 ... 172 197 numberOfPulseIntervalsPerDwell (beam) int64 64B 199 171 ... 185 212 burstDelay float64 8B 5.36e-05 rank (beam) int64 64B 14 12 12 ... 14 13 15 settableGain (beam, pole) float64 128B -18.9 ... ... radarCenterFrequency float64 8B 5.405e+09 ... ... pulseBandwidth (beam) float64 64B 1.5e+07 ... 1.5e+07 samplingWindowStartTimeFirstRawLine (beam, pole) float64 128B 8.1e-05 ..... samplingWindowStartTimeLastRawLine (beam, pole) float64 128B 7.92e-05 .... numberOfSwstChanges (beam, pole) int64 128B 3 3 3 ... 3 3 3 adcSamplingRate (beam) float64 64B 1.654e+07 ... 1.6... samplesPerEchoLine (beam) int64 64B 4578 5053 ... 4330 Attributes: acquisitionType: Medium Resolution 50m antennaPointing: Right zeroDopplerSteeringFlag: ZeroDopplerSteeringOn satOrientationRefFrame: Geocentric rawBitsPerSample: 3 steppedReceiveMode: TrueradarParameters- timeStamp: 60
- timeStamp(timeStamp)datetime64[ns]2020-02-14T11:59:03 ... 2020-02-...
array(['2020-02-14T11:59:03.000000000', '2020-02-14T11:59:04.000000000', '2020-02-14T11:59:05.000000000', '2020-02-14T11:59:06.000000000', '2020-02-14T11:59:07.000000000', '2020-02-14T11:59:08.000000000', '2020-02-14T11:59:09.000000000', '2020-02-14T11:59:10.000000000', '2020-02-14T11:59:11.000000000', '2020-02-14T11:59:12.000000000', '2020-02-14T11:59:13.000000000', '2020-02-14T11:59:14.000000000', '2020-02-14T11:59:15.000000000', '2020-02-14T11:59:16.000000000', '2020-02-14T11:59:17.000000000', '2020-02-14T11:59:18.000000000', '2020-02-14T11:59:19.000000000', '2020-02-14T11:59:20.000000000', '2020-02-14T11:59:21.000000000', '2020-02-14T11:59:22.000000000', '2020-02-14T11:59:23.000000000', '2020-02-14T11:59:24.000000000', '2020-02-14T11:59:25.000000000', '2020-02-14T11:59:26.000000000', '2020-02-14T11:59:27.000000000', '2020-02-14T11:59:28.000000000', '2020-02-14T11:59:29.000000000', '2020-02-14T11:59:30.000000000', '2020-02-14T11:59:31.000000000', '2020-02-14T11:59:32.000000000', '2020-02-14T11:59:33.000000000', '2020-02-14T11:59:34.000000000', '2020-02-14T11:59:35.000000000', '2020-02-14T11:59:36.000000000', '2020-02-14T11:59:37.000000000', '2020-02-14T11:59:38.000000000', '2020-02-14T11:59:39.000000000', '2020-02-14T11:59:40.000000000', '2020-02-14T11:59:41.000000000', '2020-02-14T11:59:42.000000000', '2020-02-14T11:59:43.000000000', '2020-02-14T11:59:44.000000000', '2020-02-14T11:59:45.000000000', '2020-02-14T11:59:46.000000000', '2020-02-14T11:59:47.000000000', '2020-02-14T11:59:48.000000000', '2020-02-14T11:59:49.000000000', '2020-02-14T11:59:50.000000000', '2020-02-14T11:59:51.000000000', '2020-02-14T11:59:52.000000000', '2020-02-14T11:59:53.000000000', '2020-02-14T11:59:54.000000000', '2020-02-14T11:59:55.000000000', '2020-02-14T11:59:56.000000000', '2020-02-14T11:59:57.000000000', '2020-02-14T11:59:58.000000000', '2020-02-14T11:59:59.000000000', '2020-02-14T12:00:00.000000000', '2020-02-14T12:00:01.000000000', '2020-02-14T12:00:02.000000000'], dtype='datetime64[ns]')
- xPosition(timeStamp)float647.279e+05 7.269e+05 ... 6.672e+05
- units :
- m
array([727923.30947263, 726941.64455863, 725958.13683564, 724973.04298486, 723986.16095913, 722997.64220788, 722007.48635449, 721015.54747334, 720022.17643443, 719027.0232458 , 718030.09067721, 717031.37839573, 716031.03774907, 715029.27020538, 714025.57879489, 713020.26184762, 712013.52164005, 711004.861258 , 709994.63157736, 708982.58083196, 707968.96244183, 706954.07610199, 705937.12653251, 704918.61460305, 703898.63562759, 702876.59796516, 701853.29839873, 700828.14310831, 699801.52635021, 698773.0571847 , 697743.12972931, 696711.35163037, 695678.11686643, 694643.53182431, 693606.69894186, 692568.81482401, 691528.88668158, 690487.41201942, 689444.68925865, 688399.92470934, 687353.61892812, 686305.97298534, 685256.38479325, 684205.45972062, 683152.79624267, 682098.50222315, 681042.76772005, 679985.20382296, 678926.1071937 , 677865.47986176, 676803.32307942, 675739.34208841, 674674.12941425, 673607.09431736, 672538.53561574, 671468.45300682, 670396.75341348, 669323.33250832, 668248.39073433, 667171.93167698]) - yPosition(timeStamp)float64-4.59e+06 -4.596e+06 ... -4.919e+06
- units :
- m
array([-4590050.76053492, -4595796.69096692, -4601537.33976971, -4607272.20653086, -4613001.4414 , -4618725.24391992, -4624443.61496387, -4630156.35212007, -4635863.50746889, -4641565.02952279, -4647260.91684301, -4652951.17027059, -4658635.98942621, -4664315.22605111, -4669988.62631062, -4675656.59205696, -4681318.97450602, -4686975.51971469, -4692626.27998742, -4698271.75258578, -4703911.44027417, -4709545.74397367, -4715174.00839712, -4720796.48598445, -4726413.72840058, -4732024.93004653, -4737630.74646207, -4743230.37371314, -4748824.76418523, -4754412.96434803, -4759995.92664488, -4765572.69862616, -4771144.23279265, -4776709.83037195, -4782269.53219045, -4787823.69949293, -4793371.82217743, -4798914.15546998, -4804451.10123265, -4809982.00262607, -4815507.11271239, -4821026.28422674, -4826539.96080751, -4832047.69774999, -4837549.79106517, -4843045.54144243, -4848536.05104385, -4854020.36526055, -4859498.88724383, -4864971.616178 , -4870438.55181537, -4875899.29094726, -4881354.63979461, -4886803.79216617, -4892247.14964126, -4897684.71310792, -4903115.93131872, -4908541.50179648, -4913961.2780503 , -4919375.25813315]) - zPosition(timeStamp)float645.185e+06 5.18e+06 ... 4.883e+06
- units :
- m
array([5185226.88403192, 5180284.8776372 , 5175337.3755486 , 5170382.8787386 , 5165422.88672318, 5160456.39950561, 5155484.41708404, 5150505.9394589 , 5145520.96711287, 5140530.49956141, 5135533.53680638, 5130531.07884592, 5125522.12568331, 5120507.1777989 , 5115486.23470856, 5110459.29641514, 5105426.36339992, 5100387.43517876, 5095342.51223437, 5090291.09360658, 5085234.18025462, 5080170.77218321, 5075101.86890351, 5070026.47090151, 5064945.57769694, 5059858.68928502, 5054765.30615364, 5049666.42829524, 5044561.55523521, 5039450.68744908, 5034333.32446225, 5029210.46674839, 5024081.6138329 , 5018947.2666745 , 5013806.42382842, 5008660.0867423 , 5003507.25444975, 4998348.92743304, 4993184.60569596, 4988014.7887506 , 4982838.47708294, 4977656.67117238, 4972468.86957606, 4967275.07373778, 4962075.282695 , 4956869.49740739, 4951658.21691722, 4946440.94170097, 4941218.17176056, 4935989.40709691, 4930754.64771004, 4925513.89359709, 4920267.64476283, 4915015.90120156, 4909757.66291799, 4904493.92991026, 4899224.70265678, 4893948.98019974, 4888668.26301762, 4883381.05111261]) - xVelocity(timeStamp)float64-980.8 -982.7 ... -1.077e+03
- units :
- m/s
array([ -980.81478756, -982.67609603, -984.23018897, -986.05851557, -987.66657746, -989.33058957, -991.0951305 , -992.50717425, -994.32620822, -996.08453861, -997.89977553, -999.49342342, -1000.92488137, -1002.86515755, -1004.4824983 , -1005.90802614, -1007.84243332, -1009.42447605, -1011.19336614, -1012.80167529, -1014.02628516, -1016.14152845, -1017.68288861, -1019.15234641, -1021.23099567, -1022.44517255, -1024.36084113, -1025.79154078, -1027.67218602, -1029.06765689, -1030.97534028, -1032.39793616, -1033.79120142, -1036.0095479 , -1037.07810339, -1039.10222762, -1040.67729027, -1041.89778706, -1043.97937793, -1045.48438294, -1046.86175378, -1048.77415035, -1050.11512941, -1051.8335701 , -1053.49090369, -1054.91716206, -1056.76009025, -1058.31314014, -1059.83121038, -1061.34721845, -1063.18147764, -1064.40593108, -1066.26934244, -1067.74334426, -1069.28208626, -1070.94950243, -1072.60653393, -1074.17283686, -1075.6357136 , -1077.21112165]) - yVelocity(timeStamp)float64-5.749e+03 ... -5.411e+03
- units :
- m/s
array([-5748.66520635, -5743.54095005, -5737.47322162, -5732.18669317, -5726.49971287, -5721.29672169, -5715.497567 , -5709.73738955, -5704.41660453, -5698.5961932 , -5693.26091964, -5687.52548974, -5681.97694049, -5676.27462521, -5670.76585803, -5665.19672232, -5659.47390336, -5653.79030678, -5648.06181932, -5642.61100456, -5636.86206955, -5631.24910217, -5625.28355647, -5620.06366953, -5614.1816692 , -5608.40072917, -5602.696369 , -5597.20402444, -5591.23781355, -5585.48654428, -5579.75234227, -5574.23553371, -5568.63945201, -5562.50233681, -5557.10147528, -5550.89344106, -5545.32596308, -5539.71511291, -5533.98023491, -5527.89864266, -5522.2474829 , -5516.5138885 , -5510.60154239, -5504.79804875, -5498.65855244, -5493.30327302, -5487.20779737, -5481.56728989, -5475.67228409, -5469.77138021, -5463.64700285, -5458.19727663, -5452.30734908, -5446.13176382, -5440.44558869, -5434.47528888, -5428.33964664, -5422.88148554, -5416.6740862 , -5410.74613856]) - zVelocity(timeStamp)float64-4.939e+03 -4.945e+03 ... -5.29e+03
- units :
- m/s
array([-4938.91501984, -4944.54756856, -4951.29304845, -4957.08992441, -4963.36211057, -4969.05777331, -4975.40761002, -4981.74475018, -4987.51581684, -4993.84650725, -4999.60666674, -5005.83405367, -5011.85879394, -5017.97358935, -5023.90225171, -5029.90955326, -5036.00759237, -5042.09381996, -5048.19126857, -5053.98808636, -5060.15153321, -5066.03395385, -5072.36587521, -5077.87486489, -5084.01528905, -5090.14692844, -5096.08698059, -5101.84687493, -5108.04843252, -5114.06843994, -5119.98563844, -5125.72147191, -5131.53261998, -5137.80303014, -5143.42214337, -5149.76397388, -5155.46700671, -5161.25140249, -5167.03845842, -5173.25870495, -5179.02522429, -5184.79425577, -5190.81424281, -5196.65658633, -5202.84492203, -5208.23019957, -5214.3205213 , -5219.96118289, -5225.8576287 , -5231.74816724, -5237.81246265, -5243.24927749, -5249.04211995, -5255.16570292, -5260.76539776, -5266.62684154, -5272.64332038, -5277.96832163, -5284.05756611, -5289.83404006])
- passDirection :
- Descending
- orbitDataSource :
- Downlinked
- withinOrbitTube :
- True
- orbitDataFileName :
- RCM-1_2020-02-15T12-21-29_003682.DEF_ORBIT
<xarray.DatasetView> Size: 3kB Dimensions: (timeStamp: 60) Coordinates: * timeStamp (timeStamp) datetime64[ns] 480B 2020-02-14T11:59:03 ... 2020-0... Data variables: xPosition (timeStamp) float64 480B 7.279e+05 7.269e+05 ... 6.672e+05 yPosition (timeStamp) float64 480B -4.59e+06 -4.596e+06 ... -4.919e+06 zPosition (timeStamp) float64 480B 5.185e+06 5.18e+06 ... 4.883e+06 xVelocity (timeStamp) float64 480B -980.8 -982.7 ... -1.076e+03 -1.077e+03 yVelocity (timeStamp) float64 480B -5.749e+03 -5.744e+03 ... -5.411e+03 zVelocity (timeStamp) float64 480B -4.939e+03 -4.945e+03 ... -5.29e+03 Attributes: passDirection: Descending orbitDataSource: Downlinked withinOrbitTube: True orbitDataFileName: RCM-1_2020-02-15T12-21-29_003682.DEF_ORBITorbitInformation- timeStamp: 120
- timeStamp(timeStamp)datetime64[ns]2020-02-14T11:59:01.690000 ... 2...
array(['2020-02-14T11:59:01.690000000', '2020-02-14T11:59:02.190000000', '2020-02-14T11:59:02.690000000', '2020-02-14T11:59:03.190000000', '2020-02-14T11:59:03.690000000', '2020-02-14T11:59:04.190000000', '2020-02-14T11:59:04.690000000', '2020-02-14T11:59:05.190000000', '2020-02-14T11:59:05.690000000', '2020-02-14T11:59:06.190000000', '2020-02-14T11:59:06.690000000', '2020-02-14T11:59:07.190000000', '2020-02-14T11:59:07.690000000', '2020-02-14T11:59:08.190000000', '2020-02-14T11:59:08.690000000', '2020-02-14T11:59:09.190000000', '2020-02-14T11:59:09.690000000', '2020-02-14T11:59:10.190000000', '2020-02-14T11:59:10.690000000', '2020-02-14T11:59:11.190000000', '2020-02-14T11:59:11.690000000', '2020-02-14T11:59:12.190000000', '2020-02-14T11:59:12.690000000', '2020-02-14T11:59:13.190000000', '2020-02-14T11:59:13.690000000', '2020-02-14T11:59:14.190000000', '2020-02-14T11:59:14.690000000', '2020-02-14T11:59:15.190000000', '2020-02-14T11:59:15.690000000', '2020-02-14T11:59:16.190000000', '2020-02-14T11:59:16.690000000', '2020-02-14T11:59:17.190000000', '2020-02-14T11:59:17.690000000', '2020-02-14T11:59:18.190000000', '2020-02-14T11:59:18.690000000', '2020-02-14T11:59:19.190000000', '2020-02-14T11:59:19.690000000', '2020-02-14T11:59:20.190000000', '2020-02-14T11:59:20.690000000', '2020-02-14T11:59:21.190000000', '2020-02-14T11:59:21.690000000', '2020-02-14T11:59:22.190000000', '2020-02-14T11:59:22.690000000', '2020-02-14T11:59:23.190000000', '2020-02-14T11:59:23.690000000', '2020-02-14T11:59:24.190000000', '2020-02-14T11:59:24.690000000', '2020-02-14T11:59:25.190000000', '2020-02-14T11:59:25.690000000', '2020-02-14T11:59:26.190000000', '2020-02-14T11:59:26.690000000', '2020-02-14T11:59:27.190000000', '2020-02-14T11:59:27.690000000', '2020-02-14T11:59:28.190000000', '2020-02-14T11:59:28.690000000', '2020-02-14T11:59:29.190000000', '2020-02-14T11:59:29.690000000', '2020-02-14T11:59:30.190000000', '2020-02-14T11:59:30.690000000', '2020-02-14T11:59:31.190000000', '2020-02-14T11:59:31.690000000', '2020-02-14T11:59:32.190000000', '2020-02-14T11:59:32.690000000', '2020-02-14T11:59:33.190000000', '2020-02-14T11:59:33.690000000', '2020-02-14T11:59:34.190000000', '2020-02-14T11:59:34.690000000', '2020-02-14T11:59:35.190000000', '2020-02-14T11:59:35.690000000', '2020-02-14T11:59:36.190000000', '2020-02-14T11:59:36.690000000', '2020-02-14T11:59:37.190000000', '2020-02-14T11:59:37.690000000', '2020-02-14T11:59:38.190000000', '2020-02-14T11:59:38.690000000', '2020-02-14T11:59:39.190000000', '2020-02-14T11:59:39.690000000', '2020-02-14T11:59:40.190000000', '2020-02-14T11:59:40.690000000', '2020-02-14T11:59:41.190000000', '2020-02-14T11:59:41.690000000', '2020-02-14T11:59:42.190000000', '2020-02-14T11:59:42.690000000', '2020-02-14T11:59:43.190000000', '2020-02-14T11:59:43.690000000', '2020-02-14T11:59:44.190000000', '2020-02-14T11:59:44.690000000', '2020-02-14T11:59:45.190000000', '2020-02-14T11:59:45.690000000', '2020-02-14T11:59:46.190000000', '2020-02-14T11:59:46.690000000', '2020-02-14T11:59:47.190000000', '2020-02-14T11:59:47.690000000', '2020-02-14T11:59:48.190000000', '2020-02-14T11:59:48.690000000', '2020-02-14T11:59:49.190000000', '2020-02-14T11:59:49.690000000', '2020-02-14T11:59:50.190000000', '2020-02-14T11:59:50.690000000', '2020-02-14T11:59:51.190000000', '2020-02-14T11:59:51.690000000', '2020-02-14T11:59:52.190000000', '2020-02-14T11:59:52.690000000', '2020-02-14T11:59:53.190000000', '2020-02-14T11:59:53.690000000', '2020-02-14T11:59:54.190000000', '2020-02-14T11:59:54.690000000', '2020-02-14T11:59:55.190000000', '2020-02-14T11:59:55.690000000', '2020-02-14T11:59:56.190000000', '2020-02-14T11:59:56.690000000', '2020-02-14T11:59:57.190000000', '2020-02-14T11:59:57.690000000', '2020-02-14T11:59:58.190000000', '2020-02-14T11:59:58.690000000', '2020-02-14T11:59:59.190000000', '2020-02-14T11:59:59.690000000', '2020-02-14T12:00:00.190000000', '2020-02-14T12:00:00.690000000', '2020-02-14T12:00:01.190000000'], dtype='datetime64[ns]')
- yaw(timeStamp)float642.483 2.481 2.48 ... 2.651 2.653
- units :
- deg
array([2.4825742 , 2.48076069, 2.47957233, 2.47918297, 2.47975327, 2.48161448, 2.48409982, 2.48553164, 2.48621905, 2.48761305, 2.48951223, 2.49111127, 2.49264069, 2.49375886, 2.49506363, 2.49739242, 2.50014227, 2.5016668 , 2.50254504, 2.50373631, 2.50510565, 2.50610786, 2.50682039, 2.5081493 , 2.51005985, 2.51244751, 2.51494673, 2.51614271, 2.51672125, 2.51772594, 2.51939424, 2.52170564, 2.52403599, 2.52510445, 2.52572301, 2.52719287, 2.52895023, 2.53028011, 2.53141021, 2.53244571, 2.53410439, 2.53723036, 2.54050134, 2.54114224, 2.54078346, 2.54201744, 2.54389774, 2.54634651, 2.54826042, 2.54847458, 2.54858755, 2.55081834, 2.55405184, 2.55535971, 2.5557725 , 2.55742905, 2.55959258, 2.56069495, 2.56143046, 2.56345446, 2.56586994, 2.56685948, 2.56731293, 2.56876086, 2.57081214, 2.57343256, 2.57573582, 2.57576605, 2.57538475, 2.57748822, 2.58094005, 2.58235261, 2.58270052, 2.58339182, 2.58499564, 2.58783467, 2.59058896, 2.59143445, 2.59099117, 2.59211523, 2.59399716, 2.59654733, 2.59890772, 2.59966223, 2.59983964, 2.60160872, 2.60405772, 2.60582544, 2.60685566, 2.60815537, 2.60964036, 2.61145769, 2.61342557, 2.61448282, 2.61521078, 2.6162366 , 2.61772419, 2.61952165, 2.62128633, 2.62320189, 2.62493513, 2.62589379, 2.62652385, 2.62860523, 2.63131818, 2.63234399, 2.63291775, 2.63432358, 2.63623493, 2.63802177, 2.63946957, 2.64074454, 2.64199083, 2.64321214, 2.64440754, 2.64563327, 2.64686005, 2.64863706, 2.65078186, 2.65265346]) - roll(timeStamp)float64-33.1 -33.1 -33.1 ... -33.1 -33.1
- units :
- deg
array([-33.09609606, -33.09616174, -33.09622792, -33.09610613, -33.09625851, -33.0962878 , -33.09613316, -33.09626265, -33.09613897, -33.09621064, -33.09624534, -33.09616496, -33.09624974, -33.0963313 , -33.09636896, -33.09629866, -33.09624919, -33.0961742 , -33.09621848, -33.09604786, -33.09614875, -33.09610405, -33.09609151, -33.09631778, -33.09615188, -33.09611575, -33.09618605, -33.096119 , -33.09611181, -33.0961629 , -33.09615362, -33.09623436, -33.09617051, -33.09621801, -33.09615027, -33.09626088, -33.09630227, -33.09617142, -33.09612745, -33.09616667, -33.09616736, -33.09606045, -33.09609698, -33.09619198, -33.09598391, -33.09599604, -33.09607972, -33.09607433, -33.09616747, -33.09599338, -33.09630533, -33.0961322 , -33.0961748 , -33.09612161, -33.09613107, -33.09623534, -33.09627958, -33.09613671, -33.09615388, -33.09614075, -33.09610117, -33.09600658, -33.09606108, -33.09608258, -33.0961077 , -33.09603352, -33.09603575, -33.09597008, -33.09598234, -33.09602739, -33.09587276, -33.09598408, -33.09614216, -33.09616246, -33.09614694, -33.09614666, -33.09617555, -33.09624351, -33.09613749, -33.09620345, -33.09609662, -33.09606849, -33.09601343, -33.09609238, -33.09598559, -33.09601857, -33.09596181, -33.09603454, -33.09600685, -33.09615954, -33.09601532, -33.09603106, -33.09612295, -33.09603647, -33.09615713, -33.09603604, -33.09610022, -33.09601869, -33.0959568 , -33.09587191, -33.09603636, -33.09599721, -33.09601629, -33.09590475, -33.09585318, -33.09591727, -33.0960069 , -33.09609166, -33.09619725, -33.09618534, -33.09616728, -33.09616386, -33.09601483, -33.09606245, -33.09610963, -33.09601805, -33.0959243 , -33.09594704, -33.09598434, -33.09587863]) - pitch(timeStamp)float640.03679 0.0368 ... 0.0394 0.03931
- units :
- deg
array([0.03679362, 0.03680441, 0.03679661, 0.03684141, 0.0368976 , 0.03681612, 0.03675182, 0.03691876, 0.03688179, 0.03699707, 0.03685591, 0.03687528, 0.03693445, 0.03693339, 0.03696795, 0.03691544, 0.03717547, 0.03708701, 0.03716424, 0.03723782, 0.03720752, 0.03715445, 0.03724608, 0.03718169, 0.03732718, 0.03730976, 0.03720791, 0.03740682, 0.03745385, 0.03738031, 0.03738323, 0.03732924, 0.03741362, 0.03741069, 0.03732956, 0.03741073, 0.03755821, 0.03748178, 0.03754432, 0.03777073, 0.03748692, 0.03768606, 0.03770913, 0.03770331, 0.03779442, 0.03783734, 0.03790894, 0.0378273 , 0.03775331, 0.03794632, 0.03790555, 0.03771848, 0.03784641, 0.03785708, 0.0378396 , 0.03801013, 0.03795766, 0.03790579, 0.0379796 , 0.03783509, 0.03788714, 0.03809063, 0.0381857 , 0.03819755, 0.03839195, 0.03841299, 0.03840452, 0.03840418, 0.03829848, 0.03833389, 0.03829368, 0.03823714, 0.03820326, 0.03819795, 0.03820528, 0.03817389, 0.03840712, 0.03834946, 0.03860235, 0.03848722, 0.03844962, 0.03861047, 0.03868924, 0.03865648, 0.03875321, 0.03864087, 0.03870068, 0.03861441, 0.03881339, 0.03852714, 0.0386664 , 0.03866511, 0.03869844, 0.03867147, 0.03880164, 0.03882205, 0.03882651, 0.03884828, 0.03890649, 0.03897195, 0.03904818, 0.0391383 , 0.0391245 , 0.03918455, 0.03900077, 0.03911474, 0.03902422, 0.03916339, 0.03906923, 0.03916618, 0.03914283, 0.03910461, 0.03914048, 0.03917898, 0.03912948, 0.03931096, 0.03933284, 0.03940048, 0.03939982, 0.03931393])
- attitudeDataSource :
- Downlink
- attitudeOffsetsApplied :
- True
<xarray.DatasetView> Size: 4kB Dimensions: (timeStamp: 120) Coordinates: * timeStamp (timeStamp) datetime64[ns] 960B 2020-02-14T11:59:01.690000 ...... Data variables: yaw (timeStamp) float64 960B 2.483 2.481 2.48 ... 2.649 2.651 2.653 roll (timeStamp) float64 960B -33.1 -33.1 -33.1 ... -33.1 -33.1 -33.1 pitch (timeStamp) float64 960B 0.03679 0.0368 0.0368 ... 0.0394 0.03931 Attributes: attitudeDataSource: Downlink attitudeOffsetsApplied: TrueattitudeInformation
<xarray.DatasetView> Size: 0B Dimensions: () Data variables: *empty*orbitAndAttitude- pole: 2
- beam: 8
- histogram: 1467
- pole(pole)<U2'HH' 'HV'
array(['HH', 'HV'], dtype='<U2')
- beam(beam)<U5'SC-10' 'SC-3' ... 'SC-8' 'SC-9'
array(['SC-10', 'SC-3', 'SC-4', 'SC-5', 'SC-6', 'SC-7', 'SC-8', 'SC-9'], dtype='<U5')
- numberOfMissingLines(pole)int640 0
array([0, 0])
- bias(pole, beam)complex128(-0.008008179254829884+0.0346506...
array([[-0.00800818+0.03465065j, -0.03131863+0.01901898j, -0.00115704+0.03699617j, -0.03470577-0.00050093j, -0.0178196 -0.00101219j, -0.02243368+0.02061179j, -0.02645879+0.00732895j, 0.0091192 +0.02533829j], [-0.04086595-0.10393665j, -0.03829988-0.10074355j, -0.02957907-0.09534553j, -0.0405474 -0.09852054j, -0.03352569-0.09995616j, -0.03778108-0.09217259j, -0.03086755-0.09578045j, -0.03091986-0.09191641j]]) - standardDeviation(pole, beam)complex128(23.67938423156738+23.7111988067...
array([[23.67938423+23.71119881j, 47.7175827 +47.77791595j, 38.79421234+38.8890686j , 29.29199791+29.31474686j, 27.56559944+27.58312798j, 21.04188538+21.06681252j, 28.02896881+28.09051132j, 23.13762474+23.18834496j], [ 9.73390675 +9.76785946j, 15.96218491+16.00499916j, 13.87858677+13.92871952j, 10.78365517+10.80482483j, 10.46121502+10.4909029j , 8.42882538 +8.45581245j, 11.38443661+11.40744972j, 9.51571941 +9.54342937j]]) - gainImbalance(pole, beam)float640.9987 0.9987 ... 0.998 0.9971
array([[0.99865824, 0.99873722, 0.99756086, 0.99922395, 0.9993645 , 0.99881673, 0.99780911, 0.99781269], [0.99652404, 0.99732494, 0.99640077, 0.99804074, 0.99717015, 0.99680847, 0.99798262, 0.99709642]]) - phaseOrthogonality(pole, beam)float64-0.07973 -0.09921 ... -0.08485
- units :
- deg
array([[-0.07972926, -0.09921373, -0.08881833, -0.1901958 , -0.10420529, -0.04352544, -0.16050535, -0.12335774], [-0.01482264, -0.0282644 , -0.03435602, -0.14133196, -0.12533182, -0.1033835 , 0.01185991, -0.08484855]]) - rawDataHistogram(histogram, pole, beam)complex1280j 0j 0j 0j 0j ... 0j 0j 0j 0j 0j
array([[[0.+0.j, 0.+0.j, 0.+0.j, ..., 0.+0.j, 0.+0.j, 0.+0.j], [0.+0.j, 0.+0.j, 0.+0.j, ..., 0.+0.j, 0.+0.j, 0.+0.j]], [[0.+0.j, 0.+0.j, 0.+0.j, ..., 0.+0.j, 0.+0.j, 0.+0.j], [0.+0.j, 0.+0.j, 0.+0.j, ..., 0.+0.j, 0.+0.j, 0.+0.j]], [[0.+0.j, 0.+0.j, 0.+0.j, ..., 0.+0.j, 0.+0.j, 0.+0.j], [0.+0.j, 0.+0.j, 0.+0.j, ..., 0.+0.j, 0.+0.j, 0.+0.j]], ..., [[0.+0.j, 0.+0.j, 0.+0.j, ..., 0.+0.j, 0.+0.j, 0.+0.j], [0.+0.j, 0.+0.j, 0.+0.j, ..., 0.+0.j, 0.+0.j, 0.+0.j]], [[0.+0.j, 0.+0.j, 0.+0.j, ..., 0.+0.j, 0.+0.j, 0.+0.j], [0.+0.j, 0.+0.j, 0.+0.j, ..., 0.+0.j, 0.+0.j, 0.+0.j]], [[0.+0.j, 0.+0.j, 0.+0.j, ..., 0.+0.j, 0.+0.j, 0.+0.j], [0.+0.j, 0.+0.j, 0.+0.j, ..., 0.+0.j, 0.+0.j, 0.+0.j]]])
- numberOfInputDataGaps :
- 0
- gapSize :
- 100
<xarray.DatasetView> Size: 377kB Dimensions: (pole: 2, beam: 8, histogram: 1467) Coordinates: * pole (pole) <U2 16B 'HH' 'HV' * beam (beam) <U5 160B 'SC-10' 'SC-3' ... 'SC-8' 'SC-9' Dimensions without coordinates: histogram Data variables: numberOfMissingLines (pole) int64 16B 0 0 bias (pole, beam) complex128 256B (-0.008008179254829884... standardDeviation (pole, beam) complex128 256B (23.67938423156738+23.... gainImbalance (pole, beam) float64 128B 0.9987 0.9987 ... 0.9971 phaseOrthogonality (pole, beam) float64 128B -0.07973 ... -0.08485 rawDataHistogram (histogram, pole, beam) complex128 376kB 0j 0j ... 0j Attributes: numberOfInputDataGaps: 0 gapSize: 100rawDataAttributes- satellite :
- RCM-1
- sensor :
- SAR
- polarizationDataMode :
- Dual Co/Cross
- downlinkSegmentId :
- 133105_150136
- inputDatasetFacilityId :
- GATN
- beamMode :
- Medium Resolution 50m
- beamModeDefinitionId :
- 22
- beamModeVersion :
- 1
- beamModeMnemonic :
- SC50MB
- rawDataStartTime :
- 2020-02-14T11:59:05.845000Z
<xarray.DatasetView> Size: 0B Dimensions: () Data variables: *empty* Attributes: satellite: RCM-1 sensor: SAR polarizationDataMode: Dual Co/Cross downlinkSegmentId: 133105_150136 inputDatasetFacilityId: GATN beamMode: Medium Resolution 50m beamModeDefinitionId: 22 beamModeVersion: 1 beamModeMnemonic: SC50MB rawDataStartTime: 2020-02-14T11:59:05.845000ZsourceAttributes- productType :
- GRD
- processingFacility :
- SHUB
- processingTime :
- 2020-02-17T19:52:32.000000Z
- softwareVersion :
- RCM PGS 6.25
- processingMode :
- Standard
- processingPriority :
- Low
<xarray.DatasetView> Size: 0B Dimensions: () Data variables: *empty* Attributes: productType: GRD processingFacility: SHUB processingTime: 2020-02-17T19:52:32.000000Z softwareVersion: RCM PGS 6.25 processingMode: Standard processingPriority: LowgeneralProcessingInformation- pole: 2
- beam: 8
- pole(pole)<U2'HH' 'HV'
array(['HH', 'HV'], dtype='<U2')
- beam(beam)<U5'SC-3' 'SC-4' ... 'SC-9' 'SC-10'
array(['SC-3', 'SC-4', 'SC-5', 'SC-6', 'SC-7', 'SC-8', 'SC-9', 'SC-10'], dtype='<U5')
- atmosphericPropagationDelay()float640.0
- units :
- us
array(0.)
- numberOfLinesProcessed(pole)int64136673 136673
array([136673, 136673])
- rangeLookBandwidth()float648.065e+06
- units :
- Hz
array(8064516.12903226)
- totalProcessedRangeBandwidth()float642.5e+07
- units :
- Hz
array(25000000.)
- perBeamNumberOfRangeLooks(beam)int644 4 4 4 4 4 4 4
array([4, 4, 4, 4, 4, 4, 4, 4])
- perBeamRangeLookBandwidths(beam)float648.065e+06 7.097e+06 ... 4.839e+06
- units :
- Hz
array([8064516.12903226, 7096774.19354839, 6129032.25806452, 5645161.29032258, 5645161.29032258, 5161290.32258064, 4838709.67741936, 4838709.67741936]) - perBeamTotalProcessedRangeBandwidths(beam)float648.065e+06 7.097e+06 ... 4.839e+06
- units :
- Hz
array([8064516.12903226, 7096774.19354839, 6129032.25806452, 5645161.29032258, 5645161.29032258, 5161290.32258064, 4838709.67741936, 4838709.67741936]) - azimuthLookBandwidth(beam)float64162.6 162.3 162.5 ... 161.3 161.7
- units :
- Hz
array([162.55053665, 162.25296746, 162.47780674, 161.36839582, 162.33496112, 161.90828836, 161.25816358, 161.72356613]) - totalProcessedAzimuthBandwidth(beam)float64162.6 162.3 162.5 ... 161.3 161.7
- units :
- Hz
array([162.55053665, 162.25296746, 162.47780674, 161.36839582, 162.33496112, 161.90828836, 161.25816358, 161.72356613]) - satelliteHeight()float645.965e+05
- units :
- m
array(596462.6330914)
- lutApplied :
- Ice
- perPolarizationScaling :
- False
- atmosphericCorrection :
- False
- elevationPatternCorrection :
- True
- rangeSpreadingLossCorrection :
- True
- pulseDependentGainCorrection :
- True
- noiseSubtractionPerformed :
- False
- receiverSettableGainCorrection :
- True
- rawDataCorrection :
- True
- bistaticCorrectionApplied :
- True
- rangeReferenceFunctionSource :
- Nominal Chirp
- dopplerSource :
- Adaptive Analysis
- estimatedRollAngleUsed :
- False
- radiometricSmoothingPerformed :
- True
- zeroDopplerTimeFirstLine :
- 2020-02-14T11:59:05.340390Z
- zeroDopplerTimeLastLine :
- 2020-02-14T12:00:00.709127Z
- numberOfRangeLooks :
- 4
- perBeamNumberOfRangeLooksUsed :
- True
- numberOfAzimuthLooks :
- 1
<xarray.DatasetView> Size: 544B Dimensions: (pole: 2, beam: 8) Coordinates: * pole (pole) <U2 16B 'HH' 'HV' * beam (beam) <U5 160B 'SC-3' ... 'SC-10' Data variables: atmosphericPropagationDelay float64 8B 0.0 numberOfLinesProcessed (pole) int64 16B 136673 136673 rangeLookBandwidth float64 8B 8.065e+06 totalProcessedRangeBandwidth float64 8B 2.5e+07 perBeamNumberOfRangeLooks (beam) int64 64B 4 4 4 4 4 4 4 4 perBeamRangeLookBandwidths (beam) float64 64B 8.065e+06 ... 4.... perBeamTotalProcessedRangeBandwidths (beam) float64 64B 8.065e+06 ... 4.... azimuthLookBandwidth (beam) float64 64B 162.6 ... 161.7 totalProcessedAzimuthBandwidth (beam) float64 64B 162.6 ... 161.7 satelliteHeight float64 8B 5.965e+05 Attributes: (12/19) lutApplied: Ice perPolarizationScaling: False atmosphericCorrection: False elevationPatternCorrection: True rangeSpreadingLossCorrection: True pulseDependentGainCorrection: True ... ... radiometricSmoothingPerformed: True zeroDopplerTimeFirstLine: 2020-02-14T11:59:05.340390Z zeroDopplerTimeLastLine: 2020-02-14T12:00:00.709127Z numberOfRangeLooks: 4 perBeamNumberOfRangeLooksUsed: True numberOfAzimuthLooks: 1sarProcessingInformation- pole: 2
- pulse: 7
- coefficients: 4
- pole(pole)<U2'HH' 'HV'
array(['HH', 'HV'], dtype='<U2')
- pulse(pulse)<U2'25' '27' '28' '29' '32' '34' '35'
array(['25', '27', '28', '29', '32', '34', '35'], dtype='<U2')
- chirpPower(pole, pulse)float64124.3 121.7 120.8 ... 120.7 119.1
- units :
- dB
array([[124.31692423, 121.71113126, 120.78993526, 121.00481844, 120.75358809, 120.09343596, 118.50972744], [124.88071716, 122.27784137, 121.35079997, 121.55517552, 121.30470254, 120.65599447, 119.07622605]]) - amplitudeCoefficients(coefficients, pole, pulse)float641.0 1.0 1.0 ... 5.908e+11 1.162e+12
array([[[ 1.00000000e+00, 9.99999940e-01, 1.00000000e+00, 1.00000000e+00, 1.00000000e+00, 1.00000000e+00, 1.00000000e+00], [ 9.99999940e-01, 1.00000000e+00, 1.00000000e+00, 1.00000000e+00, 1.00000000e+00, 1.00000000e+00, 1.00000000e+00]], [[ 2.35746574e+01, 9.28031063e+00, -1.09472786e+02, -4.65980492e+01, -1.41407455e+02, -1.34874374e+02, -1.44432556e+02], [ 2.43069820e+01, 8.70788574e+01, 2.69726849e+01, -1.80289478e+01, -1.23713913e+02, -1.57395935e+02, -1.01592735e+02]], [[-5.87182750e+05, 3.78516172e+04, 8.91118375e+05, 1.64202400e+06, 5.32206400e+06, 9.38869900e+06, 1.87279540e+07], [ 1.03203340e+07, 1.04639250e+07, 1.64016620e+07, 8.29220200e+06, 1.35642510e+07, 2.89016340e+07, 3.10712860e+07]], [[ 4.73128108e+11, 9.30165424e+11, 1.56489784e+12, 2.97620963e+11, 5.19305658e+11, 5.12749994e+11, 1.35676284e+12], [ 5.83621476e+11, 6.76090020e+11, 9.43358411e+11, 1.06878370e+11, 4.81406157e+11, 5.90788231e+11, 1.16246000e+12]]]) - phaseCoefficients(coefficients, pole, pulse)float640.385 0.7922 ... 1.708e+12
array([[[ 3.85014415e-01, 7.92232871e-01, 3.26141983e-01, 5.22548258e-01, 1.03366897e-01, 5.16008258e-01, 3.84750180e-02], [ 4.62241083e-01, 8.69483829e-01, 4.03388083e-01, 5.99935234e-01, 1.80389583e-01, 5.93171775e-01, 1.15691975e-01]], [[ 2.07816562e+05, 1.82225984e+05, 1.31055594e+05, 7.42107734e+04, 4.25827930e+04, 1.28082539e+04, 1.15338623e+04], [ 2.07726062e+05, 1.82123812e+05, 1.30968398e+05, 7.41308359e+04, 4.25146445e+04, 1.27565078e+04, 1.14659863e+04]], [[-3.54180956e+11, -3.74029320e+11, -3.23014754e+11, -2.62515622e+11, -2.26679308e+11, -2.12517388e+11, -2.55021892e+11], [-3.54180923e+11, -3.74029320e+11, -3.23014459e+11, -2.62515507e+11, -2.26678833e+11, -2.12517093e+11, -2.55021564e+11]], [[ 1.14992139e+12, 5.99003955e+11, 8.10924638e+11, 7.30079494e+11, 2.69475463e+11, 6.64492442e+10, 1.65658925e+12], [ 1.27413440e+12, 8.36532896e+11, 9.74564098e+11, 8.55384261e+11, 3.59849755e+11, 1.00224164e+11, 1.70776461e+12]]]) - replicaQualityValid(pole, pulse)boolTrue True True ... True True True
array([[ True, True, True, True, True, True, True], [ True, True, True, True, True, True, True]]) - crossCorrelationWidth(pole, pulse)float640.9375 0.9475 ... 0.9625 0.9632
array([[0.93751526, 0.9475441 , 0.98721123, 0.97546387, 0.97758865, 0.96277237, 0.96326065], [0.93716431, 0.94730568, 0.98684311, 0.97510147, 0.97732544, 0.96245766, 0.9631691 ]]) - sideLobeLevel(pole, pulse)float64-13.17 -13.23 ... -13.09 -13.17
- units :
- dB
array([[-13.16657352, -13.22963619, -13.22489929, -13.23089695, -13.20590878, -13.12987518, -13.20016193], [-13.13167286, -13.20008755, -13.18969345, -13.20178318, -13.1806078 , -13.09494019, -13.17325592]]) - integratedSideLobeRatio(pole, pulse)float64-11.15 -11.17 ... -11.12 -11.12
- units :
- dB
array([[-11.15097046, -11.1659317 , -11.19141006, -11.14718437, -11.15387821, -11.13457489, -11.12428093], [-11.13533783, -11.15543938, -11.17501354, -11.13161182, -11.14039803, -11.12054157, -11.11644077]]) - crossCorrelationPeakLoc(pole, pulse)float6435.14 29.98 25.86 ... 17.3 17.3
array([[35.140625, 29.984375, 25.859375, 22.5 , 19.6875 , 17.296875, 17.296875], [35.140625, 29.984375, 25.859375, 22.484375, 19.6875 , 17.296875, 17.296875]])
<xarray.DatasetView> Size: 2kB Dimensions: (pole: 2, pulse: 7, coefficients: 4) Coordinates: * pole (pole) <U2 16B 'HH' 'HV' * pulse (pulse) <U2 56B '25' '27' '28' '29' '32' '34' '35' Dimensions without coordinates: coefficients Data variables: chirpPower (pole, pulse) float64 112B 124.3 121.7 ... 119.1 amplitudeCoefficients (coefficients, pole, pulse) float64 448B 1.0 ...... phaseCoefficients (coefficients, pole, pulse) float64 448B 0.385 .... replicaQualityValid (pole, pulse) bool 14B True True True ... True True crossCorrelationWidth (pole, pulse) float64 112B 0.9375 0.9475 ... 0.9632 sideLobeLevel (pole, pulse) float64 112B -13.17 -13.23 ... -13.17 integratedSideLobeRatio (pole, pulse) float64 112B -11.15 -11.17 ... -11.12 crossCorrelationPeakLoc (pole, pulse) float64 112B 35.14 29.98 ... 17.3chirps- zeroDopplerAzimuthTime: 278
- coefficients: 13
- zeroDopplerAzimuthTime(zeroDopplerAzimuthTime)<U27'2020-02-14T11:59:05.340390Z' .....
array(['2020-02-14T11:59:05.340390Z', '2020-02-14T11:59:05.540277Z', '2020-02-14T11:59:05.740164Z', ..., '2020-02-14T12:00:00.309353Z', '2020-02-14T12:00:00.509240Z', '2020-02-14T12:00:00.709127Z'], dtype='<U27')
- slantRangeTimeToFirstRangeSample(zeroDopplerAzimuthTime)float640.004411 0.004411 ... 0.004411
- units :
- s
array([0.00441135, 0.00441135, 0.00441135, 0.00441135, 0.00441135, 0.00441135, 0.00441135, 0.00441135, 0.00441135, 0.00441135, 0.00441135, 0.00441135, 0.00441135, 0.00441135, 0.00441135, 0.00441135, 0.00441135, 0.00441135, 0.00441135, 0.00441135, 0.00441135, 0.00441135, 0.00441135, 0.00441135, 0.00441135, 0.00441135, 0.00441135, 0.00441135, 0.00441135, 0.00441135, 0.00441135, 0.00441135, 0.00441135, 0.00441135, 0.00441135, 0.00441135, 0.00441135, 0.00441135, 0.00441135, 0.00441135, 0.00441135, 0.00441135, 0.00441135, 0.00441135, 0.00441135, 0.00441135, 0.00441135, 0.00441135, 0.00441135, 0.00441135, 0.00441135, 0.00441135, 0.00441135, 0.00441135, 0.00441135, 0.00441135, 0.00441135, 0.00441135, 0.00441135, 0.00441135, 0.00441135, 0.00441135, 0.00441135, 0.00441135, 0.00441135, 0.00441135, 0.00441135, 0.00441135, 0.00441135, 0.00441135, 0.00441135, 0.00441135, 0.00441135, 0.00441135, 0.00441135, 0.00441135, 0.00441135, 0.00441135, 0.00441135, 0.00441135, 0.00441135, 0.00441135, 0.00441135, 0.00441135, 0.00441135, 0.00441135, 0.00441135, 0.00441135, 0.00441135, 0.00441135, 0.00441135, 0.00441135, 0.00441135, 0.00441135, 0.00441135, 0.00441135, 0.00441135, 0.00441135, 0.00441135, 0.00441135, ... 0.00441135, 0.00441135, 0.00441135, 0.00441135, 0.00441135, 0.00441135, 0.00441135, 0.00441135, 0.00441135, 0.00441135, 0.00441135, 0.00441135, 0.00441135, 0.00441135, 0.00441135, 0.00441135, 0.00441135, 0.00441135, 0.00441135, 0.00441135, 0.00441135, 0.00441135, 0.00441135, 0.00441135, 0.00441135, 0.00441135, 0.00441135, 0.00441135, 0.00441135, 0.00441135, 0.00441135, 0.00441135, 0.00441135, 0.00441135, 0.00441135, 0.00441135, 0.00441135, 0.00441135, 0.00441135, 0.00441135, 0.00441135, 0.00441135, 0.00441135, 0.00441135, 0.00441135, 0.00441135, 0.00441135, 0.00441135, 0.00441135, 0.00441135, 0.00441135, 0.00441135, 0.00441135, 0.00441135, 0.00441135, 0.00441135, 0.00441135, 0.00441135, 0.00441135, 0.00441135, 0.00441135, 0.00441135, 0.00441135, 0.00441135, 0.00441135, 0.00441135, 0.00441135, 0.00441135, 0.00441135, 0.00441135, 0.00441135, 0.00441135, 0.00441135, 0.00441135, 0.00441135, 0.00441135, 0.00441135, 0.00441135, 0.00441135, 0.00441135, 0.00441135, 0.00441135, 0.00441135, 0.00441135, 0.00441135, 0.00441135, 0.00441135, 0.00441135, 0.00441135, 0.00441135, 0.00441135, 0.00441135, 0.00441135, 0.00441135, 0.00441135, 0.00441135, 0.00441135, 0.00441135]) - groundRangeOrigin(zeroDopplerAzimuthTime)float640.0 0.0 0.0 0.0 ... 0.0 0.0 0.0 0.0
- units :
- m
array([0., 0., 0., 0., 0., 0., 0., 0., 0., 0., 0., 0., 0., 0., 0., 0., 0., 0., 0., 0., 0., 0., 0., 0., 0., 0., 0., 0., 0., 0., 0., 0., 0., 0., 0., 0., 0., 0., 0., 0., 0., 0., 0., 0., 0., 0., 0., 0., 0., 0., 0., 0., 0., 0., 0., 0., 0., 0., 0., 0., 0., 0., 0., 0., 0., 0., 0., 0., 0., 0., 0., 0., 0., 0., 0., 0., 0., 0., 0., 0., 0., 0., 0., 0., 0., 0., 0., 0., 0., 0., 0., 0., 0., 0., 0., 0., 0., 0., 0., 0., 0., 0., 0., 0., 0., 0., 0., 0., 0., 0., 0., 0., 0., 0., 0., 0., 0., 0., 0., 0., 0., 0., 0., 0., 0., 0., 0., 0., 0., 0., 0., 0., 0., 0., 0., 0., 0., 0., 0., 0., 0., 0., 0., 0., 0., 0., 0., 0., 0., 0., 0., 0., 0., 0., 0., 0., 0., 0., 0., 0., 0., 0., 0., 0., 0., 0., 0., 0., 0., 0., 0., 0., 0., 0., 0., 0., 0., 0., 0., 0., 0., 0., 0., 0., 0., 0., 0., 0., 0., 0., 0., 0., 0., 0., 0., 0., 0., 0., 0., 0., 0., 0., 0., 0., 0., 0., 0., 0., 0., 0., 0., 0., 0., 0., 0., 0., 0., 0., 0., 0., 0., 0., 0., 0., 0., 0., 0., 0., 0., 0., 0., 0., 0., 0., 0., 0., 0., 0., 0., 0., 0., 0., 0., 0., 0., 0., 0., 0., 0., 0., 0., 0., 0., 0., 0., 0., 0., 0., 0., 0., 0., 0., 0., 0., 0., 0., 0., 0., 0., 0., 0., 0., 0., 0., 0., 0., 0., 0.]) - groundToSlantRangeCoefficients(zeroDopplerAzimuthTime, coefficients)float646.612e+05 0.4508 ... -8.253e-67
array([[ 6.61244219e+05, 4.50807636e-01, 6.72328152e-07, ..., 1.56573612e-54, -8.77878099e-61, 2.67197890e-67], [ 6.61244219e+05, 4.50816410e-01, 6.72321817e-07, ..., 3.60147460e-56, 6.99533930e-61, -4.45377274e-67], [ 6.61244219e+05, 4.50825183e-01, 6.72315632e-07, ..., 2.48295440e-54, -1.84362413e-60, 7.12679590e-67], ..., [ 6.61244219e+05, 4.53195935e-01, 6.70615303e-07, ..., 1.69951547e-54, -1.05860162e-60, 3.66742712e-67], [ 6.61244219e+05, 4.53204502e-01, 6.70609142e-07, ..., 1.02046945e-54, -3.01143157e-61, 0.00000000e+00], [ 6.61244219e+05, 4.53213070e-01, 6.70602920e-07, ..., -6.96341183e-55, 1.49717905e-60, -8.25342613e-67]])
<xarray.DatasetView> Size: 63kB Dimensions: (zeroDopplerAzimuthTime: 278, coefficients: 13) Coordinates: * zeroDopplerAzimuthTime (zeroDopplerAzimuthTime) <U27 30kB '202... Dimensions without coordinates: coefficients Data variables: slantRangeTimeToFirstRangeSample (zeroDopplerAzimuthTime) float64 2kB 0.... groundRangeOrigin (zeroDopplerAzimuthTime) float64 2kB 0.... groundToSlantRangeCoefficients (zeroDopplerAzimuthTime, coefficients) float64 29kB ...slantRangeToGroundRange
<xarray.DatasetView> Size: 0B Dimensions: () Data variables: *empty*imageGenerationParameters- bitsPerSample()int6416
- type :
- magnitude
array(16)
- sampledPixelSpacing()float6420.0
- units :
- m
array(20.)
- sampledLineSpacing()float6420.0
- units :
- m
array(20.)
- sampledPixelSpacingTime()float641.334e-07
- units :
- s
array(1.33425638e-07)
- sampledLineSpacingTime()float640.002895
- units :
- s
array(0.00289519)
- sampleType :
- Magnitude Detected
- dataType :
- Integer
- lineTimeOrdering :
- Increasing
- pixelTimeOrdering :
- Decreasing
<xarray.DatasetView> Size: 40B Dimensions: () Data variables: bitsPerSample int64 8B 16 sampledPixelSpacing float64 8B 20.0 sampledLineSpacing float64 8B 20.0 sampledPixelSpacingTime float64 8B 1.334e-07 sampledLineSpacingTime float64 8B 0.002895 Attributes: sampleType: Magnitude Detected dataType: Integer lineTimeOrdering: Increasing pixelTimeOrdering: DecreasingrasterAttributes- params: 3
- semiMajorAxis()float646.378e+06
- units :
- m
array(6378137.)
- semiMinorAxis()float646.357e+06
- units :
- m
array(6356752.31424518)
- datumShiftParameters(params)float640.0 0.0 0.0
- units :
- m
array([0., 0., 0.])
- geodeticTerrainHeight()float64229.9
- units :
- m
array(229.93099567)
- ellipsoidName :
- WGS 1984
<xarray.DatasetView> Size: 48B Dimensions: (params: 3) Dimensions without coordinates: params Data variables: semiMajorAxis float64 8B 6.378e+06 semiMinorAxis float64 8B 6.357e+06 datumShiftParameters (params) float64 24B 0.0 0.0 0.0 geodeticTerrainHeight float64 8B 229.9 Attributes: ellipsoidName: WGS 1984ellipsoidParameters- line: 13
- pixel: 13
- line(line)float640.0 1.594e+03 ... 1.913e+04
array([ 0. , 1593.8334, 3187.6667, 4781.5 , 6375.3335, 7969.167 , 9563. , 11156.833 , 12750.666 , 14344.499 , 15938.332 , 17532.166 , 19126. ]) - pixel(pixel)float640.0 1.503e+03 ... 1.804e+04
array([ 0. , 1503.4166, 3006.8333, 4510.25 , 6013.6665, 7517.083 , 9020.5 , 10523.917 , 12027.334 , 13530.751 , 15034.168 , 16537.584 , 18041. ])
- latitude(line, pixel)float6448.72 48.77 48.82 ... 45.82 45.86
- units :
- deg
array([[48.71534851, 48.76832408, 48.81990431, 48.87008388, 48.9188575 , 48.96622008, 49.0121666 , 49.05669221, 49.09979216, 49.14146184, 49.18169682, 49.22049275, 49.25784541], [48.43281212, 48.48568175, 48.53716957, 48.58727035, 48.6359789 , 48.68329019, 48.72919932, 48.77370149, 48.81679205, 48.85846644, 48.89872032, 48.9375494 , 48.97494952], [48.15022622, 48.20299289, 48.25439115, 48.30441584, 48.35306187, 48.4003243 , 48.44619829, 48.49067914, 48.53376227, 48.57544319, 48.61571763, 48.65458135, 48.69203027], [47.86759144, 47.92025809, 47.97156956, 48.02152082, 48.07010684, 48.11732276, 48.16316384, 48.20762544, 48.25070306, 48.29239228, 48.3326889 , 48.37158874, 48.40908778], [47.58490836, 47.63747783, 47.68870526, 47.73858567, 47.78711413, 47.83428587, 47.88009621, 47.92454059, 47.96761458, 48.00931384, 48.04963421, 48.08857161, 48.12612205], [47.30217761, 47.35465272, 47.40579877, 47.45561087, 47.50408419, 47.551214 , 47.59699572, 47.64142487, 47.68449708, 47.72620807, 47.76655376, 47.80553012, 47.84313321], [47.01939987, 47.07178337, 47.12285066, 47.17259694, 47.22101746, 47.26810757, 47.31386276, 47.35827862, 47.40135085, 47.44307524, 47.48344777, 47.52246445, 47.56012144], [46.73657564, 46.78887021, 46.83986131, 46.88954421, 46.93791423, 46.98496681, 47.03069751, 47.07510199, 47.11817601, 47.15991542, 47.20031628, 47.23937464, 47.27708672], [46.45370547, 46.50591375, 46.55683117, 46.60645308, 46.65477487, 46.70179205, 46.74750026, 46.79189521, 46.83497275, 46.87672879, 46.91715942, 46.95626079, 46.99402914], [46.17078992, 46.2229145 , 46.2737607 , 46.32332395, 46.37159972, 46.41858359, 46.46427126, 46.50865852, 46.55174128, 46.5935155 , 46.63397734, 46.673123 , 46.71094878], [45.88782952, 45.93987293, 45.99065033, 46.04015721, 46.08838913, 46.13534173, 46.18101079, 46.22539215, 46.26848178, 46.31027571, 46.35077016, 46.38996138, 46.42784571], [45.60482463, 45.65678935, 45.70750031, 45.75695308, 45.80514327, 45.85206661, 45.89771892, 45.94209613, 45.98519426, 46.02700941, 46.06753784, 46.10677585, 46.14471985], [45.32177594, 45.37366438, 45.4243112 , 45.47371204, 45.52186258, 45.56875861, 45.61439602, 45.65877079, 45.70187902, 45.74371684, 45.78428058, 45.8235666 , 45.86157135]]) - longitude(line, pixel)float64-84.63 -85.03 ... -89.82 -90.21
- units :
- deg
array([[-84.63397773, -85.03485893, -85.43657252, -85.83909967, -86.24242065, -86.64651572, -87.05136479, -87.45694747, -87.86324307, -88.27023034, -88.67788853, -89.08619582, -89.49513011], [-84.72181616, -85.12049999, -85.52000188, -85.92030343, -86.32138545, -86.72322865, -87.12581347, -87.52912005, -87.93312821, -88.33781725, -88.74316696, -89.14915607, -89.55576306], [-84.80898835, -85.20550748, -85.60283064, -86.00093993, -86.3998166 , -86.79944187, -87.19979668, -87.60086164, -88.00261712, -88.40504292, -88.80811937, -89.21182575, -89.61614106], [-84.89550825, -85.28989472, -85.68507155, -86.08102127, -86.47772559, -86.87516623, -87.27332458, -87.67218176, -88.07171864, -88.47191552, -88.87275325, -89.27421163, -89.67627021], [-84.98138947, -85.37367476, -85.76673703, -86.16055926, -86.55512363, -86.95041229, -87.34640711, -87.74308971, -88.14044141, -88.53844303, -88.93707591, -89.33632037, -89.73615646], ... [-85.31878745, -85.70297133, -86.08788173, -86.47350326, -86.85981979, -87.24681519, -87.6344731 , -88.02277689, -88.41170973, -88.80125428, -89.19139374, -89.58211033, -89.97338607], [-85.40166741, -85.78389909, -86.16684537, -86.55049124, -86.93482099, -87.31981887, -87.70546893, -88.09175498, -88.47866058, -88.86616884, -89.2542634 , -89.64292693, -90.03214187], [-85.48398335, -85.86429106, -86.24530171, -86.62700068, -87.00937263, -87.39240221, -87.77607387, -88.16037182, -88.54528004, -88.93078206, -89.31686194, -89.70350278, -90.09068748], [-85.56574673, -85.9441582 , -86.32326121, -86.7030415 , -87.08348412, -87.4645741 , -87.84629628, -88.22863524, -88.6115754 , -88.99510067, -89.37919553, -89.76384351, -90.14902793], [-85.6469686 , -86.02351092, -86.40073367, -86.77862293, -87.1571641 , -87.53634258, -87.9161436 , -88.29655212, -88.67755293, -89.05913037, -89.4412693 , -89.82395366, -90.20716719]]) - height(line, pixel)float64229.9 229.9 229.9 ... 229.9 229.9
- units :
- m
array([[229.93099567, 229.93099567, 229.93099567, 229.93099567, 229.93099567, 229.93099567, 229.93099567, 229.93099567, 229.93099567, 229.93099567, 229.93099567, 229.93099567, 229.93099567], [229.93099567, 229.93099567, 229.93099567, 229.93099567, 229.93099567, 229.93099567, 229.93099567, 229.93099567, 229.93099567, 229.93099567, 229.93099567, 229.93099567, 229.93099567], [229.93099567, 229.93099567, 229.93099567, 229.93099567, 229.93099567, 229.93099567, 229.93099567, 229.93099567, 229.93099567, 229.93099567, 229.93099567, 229.93099567, 229.93099567], [229.93099567, 229.93099567, 229.93099567, 229.93099567, 229.93099567, 229.93099567, 229.93099567, 229.93099567, 229.93099567, 229.93099567, 229.93099567, 229.93099567, 229.93099567], [229.93099567, 229.93099567, 229.93099567, 229.93099567, 229.93099567, 229.93099567, 229.93099567, 229.93099567, 229.93099567, 229.93099567, 229.93099567, 229.93099567, 229.93099567], ... [229.93099567, 229.93099567, 229.93099567, 229.93099567, 229.93099567, 229.93099567, 229.93099567, 229.93099567, 229.93099567, 229.93099567, 229.93099567, 229.93099567, 229.93099567], [229.93099567, 229.93099567, 229.93099567, 229.93099567, 229.93099567, 229.93099567, 229.93099567, 229.93099567, 229.93099567, 229.93099567, 229.93099567, 229.93099567, 229.93099567], [229.93099567, 229.93099567, 229.93099567, 229.93099567, 229.93099567, 229.93099567, 229.93099567, 229.93099567, 229.93099567, 229.93099567, 229.93099567, 229.93099567, 229.93099567], [229.93099567, 229.93099567, 229.93099567, 229.93099567, 229.93099567, 229.93099567, 229.93099567, 229.93099567, 229.93099567, 229.93099567, 229.93099567, 229.93099567, 229.93099567], [229.93099567, 229.93099567, 229.93099567, 229.93099567, 229.93099567, 229.93099567, 229.93099567, 229.93099567, 229.93099567, 229.93099567, 229.93099567, 229.93099567, 229.93099567]])
- footprint :
- POLYGON ((-84.63397773377159 48.71534850877886, -89.49513011173734 49.25784540666172, -90.20716719088948 45.86157135154452, -85.64696859864004 45.32177593908131, -84.63397773377159 48.71534850877886))
<xarray.DatasetView> Size: 4kB Dimensions: (line: 13, pixel: 13) Coordinates: * line (line) float64 104B 0.0 1.594e+03 ... 1.753e+04 1.913e+04 * pixel (pixel) float64 104B 0.0 1.503e+03 ... 1.654e+04 1.804e+04 Data variables: latitude (line, pixel) float64 1kB 48.72 48.77 48.82 ... 45.78 45.82 45.86 longitude (line, pixel) float64 1kB -84.63 -85.03 -85.44 ... -89.82 -90.21 height (line, pixel) float64 1kB 229.9 229.9 229.9 ... 229.9 229.9 229.9 Attributes: footprint: POLYGON ((-84.63397773377159 48.71534850877886, -89.495130111...geolocationGrid- coefficients: 20
- biasError()float640.5
- units :
- m
array(0.5)
- randomError()float640.5
- units :
- m
array(0.5)
- latitudeOffset()float6447.29
- units :
- deg
array(47.289)
- longitudeOffset()float64-87.42
- units :
- deg
array(-87.4158)
- heightOffset()float64229.0
- units :
- m
array(229.)
- lineNumeratorCoefficients(coefficients)float640.009342 -0.1851 ... -3.352e-07 0.0
array([ 9.34170268e-03, -1.85068703e-01, -1.12574618e+00, -6.10144309e-06, 6.20882108e-03, 8.06590972e-08, -5.45868399e-08, -1.94295403e-02, -6.43747058e-03, 2.00568473e-08, 1.63147366e-06, -2.60296220e-05, 8.23154596e-05, -1.30237621e-06, -4.14370442e-05, -2.42257289e-05, -7.97568197e-06, 2.96987826e-07, -3.35202910e-07, 0.00000000e+00]) - lineDenominatorCoefficients(coefficients)float641.0 0.005121 0.004405 ... 0.0 0.0
array([ 1.00000000e+00, 5.12053136e-03, 4.40524404e-03, -4.02297328e-08, 3.02428740e-05, -1.50312762e-06, 3.15315853e-07, 2.35759154e-05, 6.22136693e-06, 7.08118918e-06, 0.00000000e+00, -9.88062577e-07, -1.08733801e-05, 3.67241164e-08, 3.95919196e-05, 6.95203246e-07, 0.00000000e+00, 0.00000000e+00, 0.00000000e+00, 0.00000000e+00]) - pixelNumeratorCoefficients(coefficients)float640.03373 1.155 ... -1.017e-06
array([ 3.37294658e-02, 1.15513562e+00, -2.07308333e-01, 3.89731639e-03, -1.31335411e-02, 8.55127854e-04, -6.68586537e-05, -2.21233716e-02, -1.20625919e-03, -1.44350315e-05, -1.94326611e-04, 7.93410866e-05, -8.59207559e-04, -4.37958576e-04, 4.97445616e-04, 6.45803713e-07, 7.86466731e-05, 6.73269299e-04, 1.06237140e-05, -1.01657727e-06]) - pixelDenominatorCoefficients(coefficients)float641.0 -0.01611 ... 5.209e-07
array([ 1.00000000e+00, -1.61104443e-02, 2.18819967e-02, -8.60798873e-04, -1.58733461e-04, -2.81496417e-04, 9.49380126e-05, 2.25363730e-04, 6.85153488e-04, -3.80327273e-04, 1.84158910e-04, -1.02652130e-06, -2.31738906e-05, -1.88567979e-06, 1.76799266e-05, 2.88245746e-05, -1.33907233e-05, -4.16793424e-04, -1.07843001e-05, 5.20908763e-07])
- lineFitQuality :
- 0.00334060350484419
- pixelFitQuality :
- 0.07741306192873083
- lineOffset :
- 9562
- pixelOffset :
- 9021
- lineScale :
- 9564
- pixelScale :
- 9021
- latitudeScale :
- 1.9694
- longitudeScale :
- 2.7977
- heightScale :
- 601.0
<xarray.DatasetView> Size: 680B Dimensions: (coefficients: 20) Dimensions without coordinates: coefficients Data variables: biasError float64 8B 0.5 randomError float64 8B 0.5 latitudeOffset float64 8B 47.29 longitudeOffset float64 8B -87.42 heightOffset float64 8B 229.0 lineNumeratorCoefficients (coefficients) float64 160B 0.009342 ... 0.0 lineDenominatorCoefficients (coefficients) float64 160B 1.0 ... 0.0 pixelNumeratorCoefficients (coefficients) float64 160B 0.03373 ... -1.... pixelDenominatorCoefficients (coefficients) float64 160B 1.0 ... 5.209e-07 Attributes: lineFitQuality: 0.00334060350484419 pixelFitQuality: 0.07741306192873083 lineOffset: 9562 pixelOffset: 9021 lineScale: 9564 pixelScale: 9021 latitudeScale: 1.9694 longitudeScale: 2.7977 heightScale: 601.0rationalFunctions
<xarray.DatasetView> Size: 0B Dimensions: () Data variables: *empty*geographicInformation- sarCalibrationType: 3
- pole: 2
- sarCalibrationType(sarCalibrationType)<U12'Beta Nought' ... 'Sigma Nought'
array(['Beta Nought', 'Gamma', 'Sigma Nought'], dtype='<U12')
- pole(pole)<U2'HH' 'HV'
array(['HH', 'HV'], dtype='<U2')
- lookupTableFileName(sarCalibrationType, pole)<U15'lutBeta_HH.xml' ... 'lutSigma_H...
array([['lutBeta_HH.xml', 'lutBeta_HV.xml'], ['lutGamma_HH.xml', 'lutGamma_HV.xml'], ['lutSigma_HH.xml', 'lutSigma_HV.xml']], dtype='<U15') - noiseLevelFileName(pole)<U18'noiseLevels_HH.xml' 'noiseLevel...
array(['noiseLevels_HH.xml', 'noiseLevels_HV.xml'], dtype='<U18')
- productFormat :
- GeoTIFF
- outputMediaInterleaving :
- BSQ
- incidenceAngleFileName :
- incidenceAngles.xml
<xarray.DatasetView> Size: 664B Dimensions: (sarCalibrationType: 3, pole: 2) Coordinates: * sarCalibrationType (sarCalibrationType) <U12 144B 'Beta Nought' ... 'Si... * pole (pole) <U2 16B 'HH' 'HV' Data variables: lookupTableFileName (sarCalibrationType, pole) <U15 360B 'lutBeta_HH.xml... noiseLevelFileName (pole) <U18 144B 'noiseLevels_HH.xml' 'noiseLevels_H... Attributes: productFormat: GeoTIFF outputMediaInterleaving: BSQ incidenceAngleFileName: incidenceAngles.xmlimageReferenceAttributes- pole: 2
- pole(pole)<U2'HH' 'HV'
array(['HH', 'HV'], dtype='<U2')
- ipdf(pole)<U27'../imagery/1050605_1_HH.tif' '....
array(['../imagery/1050605_1_HH.tif', '../imagery/1050605_1_HV.tif'], dtype='<U27') - incAngNearRng()float6426.87
- units :
- deg
array(26.87371332)
- incAngFarRng()float6450.94
- units :
- deg
array(50.94029276)
- slantRangeNearEdge()float646.612e+05
- units :
- m
array(661244.21865407)
- slantRangeFarEdge()float648.913e+05
- units :
- m
array(891305.35413327)
- mean(pole)float649.975e+03 3.564e+03
array([9974.52832031, 3563.61157227])
- sigma(pole)float646.879e+03 3.023e+03
array([6878.79248047, 3023.05566406])
- pixelOffset :
- 0
- lineOffset :
- 0
- numLines :
- 19127
- samplesPerLine :
- 18042
<xarray.DatasetView> Size: 296B Dimensions: (pole: 2) Coordinates: * pole (pole) <U2 16B 'HH' 'HV' Data variables: ipdf (pole) <U27 216B '../imagery/1050605_1_HH.tif' '../im... incAngNearRng float64 8B 26.87 incAngFarRng float64 8B 50.94 slantRangeNearEdge float64 8B 6.612e+05 slantRangeFarEdge float64 8B 8.913e+05 mean (pole) float64 16B 9.975e+03 3.564e+03 sigma (pole) float64 16B 6.879e+03 3.023e+03 Attributes: pixelOffset: 0 lineOffset: 0 numLines: 19127 samplesPerLine: 18042sceneAttributes- burst_maps: 1
- burst: 776
- beam: 8
- burst(burst)int640 1 2 3 4 5 ... 771 772 773 774 775
array([ 0, 1, 2, ..., 773, 774, 775])
- beam(beam)<U5'SC-10' 'SC-3' ... 'SC-8' 'SC-9'
array(['SC-10', 'SC-3', 'SC-4', 'SC-5', 'SC-6', 'SC-7', 'SC-8', 'SC-9'], dtype='<U5')
- topLeftLine(burst_maps, burst, beam)float64nan 11.0 nan nan ... nan nan nan
array([[[ nan, 1.1000e+01, nan, ..., nan, nan, nan], [ nan, nan, 3.4000e+01, ..., nan, nan, nan], [ nan, nan, nan, ..., nan, nan, nan], ..., [ nan, nan, nan, ..., nan, 1.8769e+04, nan], [ nan, nan, nan, ..., nan, nan, 1.8796e+04], [1.8823e+04, nan, nan, ..., nan, nan, nan]]]) - topLeftPixel(burst_maps, burst, beam)float64nan 1.566e+04 nan ... nan nan nan
array([[[ nan, 15655., nan, ..., nan, nan, nan], [ nan, nan, 13430., ..., nan, nan, nan], [ nan, nan, nan, ..., nan, nan, nan], ..., [ nan, nan, nan, ..., nan, 4627., nan], [ nan, nan, nan, ..., nan, nan, 2401.], [ 112., nan, nan, ..., nan, nan, nan]]]) - bottomRightLine(burst_maps, burst, beam)float64nan 274.0 nan nan ... nan nan nan
array([[[ nan, 274., nan, ..., nan, nan, nan], [ nan, nan, 296., ..., nan, nan, nan], [ nan, nan, nan, ..., nan, nan, nan], ..., [ nan, nan, nan, ..., nan, 19045., nan], [ nan, nan, nan, ..., nan, nan, 19099.], [19112., nan, nan, ..., nan, nan, nan]]]) - bottomRightPixel(burst_maps, burst, beam)float64nan 1.794e+04 nan ... nan nan nan
array([[[ nan, 17944., nan, ..., nan, nan, nan], [ nan, nan, 15662., ..., nan, nan, nan], [ nan, nan, nan, ..., nan, nan, nan], ..., [ nan, nan, nan, ..., nan, 6861., nan], [ nan, nan, nan, ..., nan, nan, 4634.], [ 2408., nan, nan, ..., nan, nan, nan]]])
- numberOfEntries :
- 776
- numberOfBeams :
- 8
<xarray.DatasetView> Size: 205kB Dimensions: (burst_maps: 1, burst: 776, beam: 8) Coordinates: * burst (burst) int64 6kB 0 1 2 3 4 5 ... 770 771 772 773 774 775 * beam (beam) <U5 160B 'SC-10' 'SC-3' 'SC-4' ... 'SC-8' 'SC-9' Dimensions without coordinates: burst_maps Data variables: topLeftLine (burst_maps, burst, beam) float64 50kB nan 11.0 ... nan topLeftPixel (burst_maps, burst, beam) float64 50kB nan ... nan bottomRightLine (burst_maps, burst, beam) float64 50kB nan 274.0 ... nan bottomRightPixel (burst_maps, burst, beam) float64 50kB nan ... nan Attributes: numberOfEntries: 776 numberOfBeams: 8grdBurstMap- burst_maps: 1
- burst: 776
- coefficients: 4
- burst(burst)int640 1 2 3 4 5 ... 771 772 773 774 775
array([ 0, 1, 2, ..., 773, 774, 775])
- timeOfDopplerCentroidEstimate(burst_maps, burst)<U27'2020-02-14T11:59:05.878596Z' .....
array([['2020-02-14T11:59:05.878596Z', '2020-02-14T11:59:05.941159Z', '2020-02-14T11:59:06.005965Z', '2020-02-14T11:59:06.073034Z', '2020-02-14T11:59:06.142742Z', '2020-02-14T11:59:06.215321Z', '2020-02-14T11:59:06.290712Z', '2020-02-14T11:59:06.369101Z', '2020-02-14T11:59:06.439174Z', '2020-02-14T11:59:06.501737Z', '2020-02-14T11:59:06.566544Z', '2020-02-14T11:59:06.633612Z', '2020-02-14T11:59:06.703321Z', '2020-02-14T11:59:06.775899Z', '2020-02-14T11:59:06.851290Z', '2020-02-14T11:59:06.929680Z', '2020-02-14T11:59:06.999753Z', '2020-02-14T11:59:07.062315Z', '2020-02-14T11:59:07.127122Z', '2020-02-14T11:59:07.194191Z', '2020-02-14T11:59:07.263899Z', '2020-02-14T11:59:07.336477Z', '2020-02-14T11:59:07.411869Z', '2020-02-14T11:59:07.490258Z', '2020-02-14T11:59:07.560331Z', '2020-02-14T11:59:07.622894Z', '2020-02-14T11:59:07.687700Z', '2020-02-14T11:59:07.754769Z', '2020-02-14T11:59:07.824478Z', '2020-02-14T11:59:07.897056Z', '2020-02-14T11:59:07.972447Z', '2020-02-14T11:59:08.050837Z', '2020-02-14T11:59:08.120909Z', '2020-02-14T11:59:08.183472Z', '2020-02-14T11:59:08.248279Z', '2020-02-14T11:59:08.315348Z', '2020-02-14T11:59:08.385056Z', '2020-02-14T11:59:08.457634Z', '2020-02-14T11:59:08.533026Z', '2020-02-14T11:59:08.611415Z', ... '2020-02-14T11:59:57.556374Z', '2020-02-14T11:59:57.623369Z', '2020-02-14T11:59:57.693001Z', '2020-02-14T11:59:57.765502Z', '2020-02-14T11:59:57.840814Z', '2020-02-14T11:59:57.919121Z', '2020-02-14T11:59:57.989120Z', '2020-02-14T11:59:58.051615Z', '2020-02-14T11:59:58.116350Z', '2020-02-14T11:59:58.183346Z', '2020-02-14T11:59:58.252977Z', '2020-02-14T11:59:58.325479Z', '2020-02-14T11:59:58.400790Z', '2020-02-14T11:59:58.479098Z', '2020-02-14T11:59:58.549097Z', '2020-02-14T11:59:58.611592Z', '2020-02-14T11:59:58.676327Z', '2020-02-14T11:59:58.743322Z', '2020-02-14T11:59:58.812954Z', '2020-02-14T11:59:58.885455Z', '2020-02-14T11:59:58.960767Z', '2020-02-14T11:59:59.039074Z', '2020-02-14T11:59:59.109073Z', '2020-02-14T11:59:59.171568Z', '2020-02-14T11:59:59.236303Z', '2020-02-14T11:59:59.303298Z', '2020-02-14T11:59:59.372930Z', '2020-02-14T11:59:59.445431Z', '2020-02-14T11:59:59.520743Z', '2020-02-14T11:59:59.599051Z', '2020-02-14T11:59:59.669050Z', '2020-02-14T11:59:59.731544Z', '2020-02-14T11:59:59.796280Z', '2020-02-14T11:59:59.863275Z', '2020-02-14T11:59:59.932906Z', '2020-02-14T12:00:00.005408Z', '2020-02-14T12:00:00.080720Z', '2020-02-14T12:00:00.159027Z']], dtype='<U27') - dopplerAmbiguity(burst_maps, burst)int640 0 0 0 0 0 0 0 ... 0 0 0 0 0 0 0 0
array([[0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0]]) - dopplerCentroidReferenceTime(burst_maps, burst)float640.004434 0.004579 ... 0.005726
- units :
- s
array([[0.00443406, 0.0045792 , 0.00474019, 0.00491579, 0.00510377, 0.00530377, 0.00551404, 0.00573308, 0.00443406, 0.0045792 , 0.00474019, 0.00491579, 0.00510377, 0.00530377, 0.00551404, 0.00573308, 0.00443406, 0.0045792 , 0.00474019, 0.00491579, 0.00510377, 0.00530377, 0.00551404, 0.00573308, 0.00443406, 0.0045792 , 0.00474019, 0.00491579, 0.00510377, 0.00530377, 0.00551404, 0.00573308, 0.00443406, 0.0045792 , 0.00474019, 0.00491579, 0.00510377, 0.00530377, 0.00551404, 0.00573308, 0.00443406, 0.0045792 , 0.00474019, 0.00491579, 0.00510377, 0.00530377, 0.00551404, 0.00573308, 0.00443406, 0.0045792 , 0.00474019, 0.00491579, 0.00510377, 0.00530377, 0.00551404, 0.00573308, 0.00443406, 0.0045792 , 0.00474019, 0.00491579, 0.00510377, 0.00530377, 0.00551404, 0.00573308, 0.00443406, 0.0045792 , 0.00474019, 0.00491579, 0.00510377, 0.00530377, 0.00551404, 0.00573308, 0.00443406, 0.0045792 , 0.00474019, 0.00491579, 0.00510377, 0.00530377, 0.00551404, 0.00573308, 0.00443406, 0.0045792 , 0.00474019, 0.00491579, 0.00510377, 0.00530377, 0.00551404, 0.00573308, 0.00443406, 0.0045792 , 0.00474019, 0.00491579, 0.00510377, 0.00530284, 0.00551301, 0.00573206, 0.00443324, 0.00457838, 0.00473927, 0.00491487, ... 0.00442826, 0.0045734 , 0.00473419, 0.00490939, 0.00509717, 0.00529697, 0.00550704, 0.00572568, 0.00442826, 0.0045734 , 0.00473419, 0.00490939, 0.00509717, 0.00529697, 0.00550704, 0.00572568, 0.00442826, 0.0045734 , 0.00473419, 0.00490939, 0.00509717, 0.00529697, 0.00550704, 0.00572568, 0.00442826, 0.0045734 , 0.00473419, 0.00490939, 0.00509717, 0.00529697, 0.00550704, 0.00572568, 0.00442826, 0.0045734 , 0.00473419, 0.00490939, 0.00509717, 0.00529697, 0.00550704, 0.00572568, 0.00442826, 0.0045734 , 0.00473419, 0.00490939, 0.00509717, 0.00529697, 0.00550704, 0.00572568, 0.00442826, 0.0045734 , 0.00473419, 0.00490939, 0.00509717, 0.00529697, 0.00550704, 0.00572568, 0.00442826, 0.0045734 , 0.00473419, 0.00490939, 0.00509717, 0.00529697, 0.00550704, 0.00572568, 0.00442826, 0.0045734 , 0.00473419, 0.00490939, 0.00509717, 0.00529697, 0.00550704, 0.00572568, 0.00442826, 0.0045734 , 0.00473419, 0.00490939, 0.00509717, 0.00529697, 0.00550704, 0.00572568, 0.00442826, 0.0045734 , 0.00473419, 0.00490939, 0.00509717, 0.00529697, 0.00550704, 0.00572568, 0.00442826, 0.0045734 , 0.00473419, 0.00490939, 0.00509717, 0.00529697, 0.00550704, 0.00572568]]) - dopplerCentroidCoefficients(burst_maps, burst, coefficients)float64-115.8 -1.217e+05 ... -6.922e+09
array([[[-1.15846091e+02, -1.21655624e+05, 9.50728602e+07, -7.68131828e+10], [-1.11244531e+02, -3.37617034e+04, 2.60965570e+07, -1.79139903e+10], [-1.10297096e+02, 2.57329403e+04, -7.08421037e+06, 2.14627123e+09], ..., [-9.25936538e+01, 1.13153129e+05, -3.49585985e+07, 1.06149430e+10], [-7.22128833e+01, -7.29952970e+04, 2.26658618e+07, -6.62808411e+09], [-6.70541456e+01, -9.45544348e+04, 2.65331108e+07, -6.92207992e+09]]]) - dopplerCentroidConfidence(burst_maps, burst)float640.9194 0.9024 ... 0.9058 0.8719
array([[0.91943437, 0.90240347, 0.91319323, 0.90607947, 0.91211849, 0.88851607, 0.91132945, 0.87252313, 0.86517894, 0.84135336, 0.85343832, 0.84145999, 0.85041243, 0.81127751, 0.85433996, 0.79415482, 0.86517894, 0.84135336, 0.85343832, 0.84145999, 0.85041243, 0.81127751, 0.85433996, 0.79415482, 0.86517894, 0.84135336, 0.85343832, 0.84145999, 0.85041243, 0.81127751, 0.85433996, 0.79415482, 0.86517894, 0.84135336, 0.85343832, 0.84145999, 0.85041243, 0.81127751, 0.85433996, 0.79415482, 0.86517894, 0.84135336, 0.85343832, 0.84145999, 0.85041243, 0.81127751, 0.85433996, 0.79415482, 0.86517894, 0.84135336, 0.85343832, 0.84145999, 0.85041243, 0.81127751, 0.85433996, 0.79415482, 0.86517894, 0.84135336, 0.85343832, 0.84145999, 0.85041243, 0.81127751, 0.85433996, 0.79415482, 0.86517894, 0.84135336, 0.85343832, 0.84145999, 0.85041243, 0.81127751, 0.85433996, 0.79415482, 0.86517894, 0.84135336, 0.85343832, 0.84145999, 0.85041243, 0.81127751, 0.85433996, 0.79415482, 0.86517894, 0.84135336, 0.85343832, 0.84145999, 0.85041243, 0.81127751, 0.85433996, 0.79415482, 0.8651402 , 0.84336436, 0.85488534, 0.84276432, 0.8532235 , 0.78267181, 0.85452712, 0.79772073, 0.86256206, 0.84108722, 0.85554105, 0.83041793, ... 0.85408765, 0.85039192, 0.86364961, 0.85312957, 0.86396831, 0.82329369, 0.84822226, 0.82566583, 0.83839625, 0.85144204, 0.86724627, 0.85007358, 0.86618584, 0.82272834, 0.85789758, 0.82313895, 0.84370238, 0.85497689, 0.86757767, 0.85269743, 0.8631689 , 0.81613314, 0.85770303, 0.81378329, 0.8604911 , 0.85634673, 0.86747861, 0.86092389, 0.86026198, 0.81639498, 0.85237098, 0.81369096, 0.83574498, 0.8562153 , 0.87138528, 0.8632797 , 0.86288023, 0.82592934, 0.8557471 , 0.82057756, 0.81373024, 0.84203869, 0.87175888, 0.86215395, 0.86222005, 0.83140004, 0.85657948, 0.82455188, 0.84198791, 0.80867952, 0.87012118, 0.85975724, 0.85751688, 0.82662129, 0.85558957, 0.81926048, 0.86666608, 0.80411774, 0.86941314, 0.85473907, 0.85984886, 0.82358229, 0.85123849, 0.81486213, 0.87202793, 0.82597536, 0.86818337, 0.85660076, 0.86621785, 0.81653589, 0.83836633, 0.80784112, 0.87270957, 0.83828896, 0.8686493 , 0.86131215, 0.86511981, 0.81195182, 0.82930273, 0.79621059, 0.870408 , 0.84605652, 0.86274505, 0.86136776, 0.8581602 , 0.81362647, 0.83492255, 0.79079854, 0.9225108 , 0.9097333 , 0.9148221 , 0.9174872 , 0.91404605, 0.88647503, 0.90583885, 0.87187672]])
- numberOfEstimates :
- 776
<xarray.DatasetView> Size: 133kB Dimensions: (burst_maps: 1, burst: 776, coefficients: 4) Coordinates: * burst (burst) int64 6kB 0 1 2 3 ... 772 773 774 775 Dimensions without coordinates: burst_maps, coefficients Data variables: timeOfDopplerCentroidEstimate (burst_maps, burst) <U27 84kB '2020-02-14T... dopplerAmbiguity (burst_maps, burst) int64 6kB 0 0 0 ... 0 0 0 dopplerCentroidReferenceTime (burst_maps, burst) float64 6kB 0.004434 .... dopplerCentroidCoefficients (burst_maps, burst, coefficients) float64 25kB ... dopplerCentroidConfidence (burst_maps, burst) float64 6kB 0.9194 ...... Attributes: numberOfEstimates: 776dopplerCentroid- burst_maps: 1
- burst: 776
- coefficients: 5
- burst(burst)int640 1 2 3 4 5 ... 771 772 773 774 775
array([ 0, 1, 2, ..., 773, 774, 775])
- timeOfDopplerRateEstimate(burst_maps, burst)<U27'2020-02-14T11:59:05.878596Z' .....
array([['2020-02-14T11:59:05.878596Z', '2020-02-14T11:59:05.941159Z', '2020-02-14T11:59:06.005965Z', '2020-02-14T11:59:06.073034Z', '2020-02-14T11:59:06.142742Z', '2020-02-14T11:59:06.215321Z', '2020-02-14T11:59:06.290712Z', '2020-02-14T11:59:06.369101Z', '2020-02-14T11:59:06.439174Z', '2020-02-14T11:59:06.501737Z', '2020-02-14T11:59:06.566544Z', '2020-02-14T11:59:06.633612Z', '2020-02-14T11:59:06.703321Z', '2020-02-14T11:59:06.775899Z', '2020-02-14T11:59:06.851290Z', '2020-02-14T11:59:06.929680Z', '2020-02-14T11:59:06.999753Z', '2020-02-14T11:59:07.062315Z', '2020-02-14T11:59:07.127122Z', '2020-02-14T11:59:07.194191Z', '2020-02-14T11:59:07.263899Z', '2020-02-14T11:59:07.336477Z', '2020-02-14T11:59:07.411869Z', '2020-02-14T11:59:07.490258Z', '2020-02-14T11:59:07.560331Z', '2020-02-14T11:59:07.622894Z', '2020-02-14T11:59:07.687700Z', '2020-02-14T11:59:07.754769Z', '2020-02-14T11:59:07.824478Z', '2020-02-14T11:59:07.897056Z', '2020-02-14T11:59:07.972447Z', '2020-02-14T11:59:08.050837Z', '2020-02-14T11:59:08.120909Z', '2020-02-14T11:59:08.183472Z', '2020-02-14T11:59:08.248279Z', '2020-02-14T11:59:08.315348Z', '2020-02-14T11:59:08.385056Z', '2020-02-14T11:59:08.457634Z', '2020-02-14T11:59:08.533026Z', '2020-02-14T11:59:08.611415Z', ... '2020-02-14T11:59:57.556374Z', '2020-02-14T11:59:57.623369Z', '2020-02-14T11:59:57.693001Z', '2020-02-14T11:59:57.765502Z', '2020-02-14T11:59:57.840814Z', '2020-02-14T11:59:57.919121Z', '2020-02-14T11:59:57.989120Z', '2020-02-14T11:59:58.051615Z', '2020-02-14T11:59:58.116350Z', '2020-02-14T11:59:58.183346Z', '2020-02-14T11:59:58.252977Z', '2020-02-14T11:59:58.325479Z', '2020-02-14T11:59:58.400790Z', '2020-02-14T11:59:58.479098Z', '2020-02-14T11:59:58.549097Z', '2020-02-14T11:59:58.611592Z', '2020-02-14T11:59:58.676327Z', '2020-02-14T11:59:58.743322Z', '2020-02-14T11:59:58.812954Z', '2020-02-14T11:59:58.885455Z', '2020-02-14T11:59:58.960767Z', '2020-02-14T11:59:59.039074Z', '2020-02-14T11:59:59.109073Z', '2020-02-14T11:59:59.171568Z', '2020-02-14T11:59:59.236303Z', '2020-02-14T11:59:59.303298Z', '2020-02-14T11:59:59.372930Z', '2020-02-14T11:59:59.445431Z', '2020-02-14T11:59:59.520743Z', '2020-02-14T11:59:59.599051Z', '2020-02-14T11:59:59.669050Z', '2020-02-14T11:59:59.731544Z', '2020-02-14T11:59:59.796280Z', '2020-02-14T11:59:59.863275Z', '2020-02-14T11:59:59.932906Z', '2020-02-14T12:00:00.005408Z', '2020-02-14T12:00:00.080720Z', '2020-02-14T12:00:00.159027Z']], dtype='<U27') - dopplerRateReferenceTime(burst_maps, burst)float640.004417 0.00456 ... 0.005699
- units :
- s
array([[0.00441722, 0.00456038, 0.00471956, 0.00489355, 0.00508048, 0.00527901, 0.00548796, 0.00570624, 0.00441722, 0.00456038, 0.00471956, 0.00489355, 0.00508048, 0.00527901, 0.00548796, 0.00570624, 0.00441722, 0.00456038, 0.00471956, 0.00489355, 0.00508048, 0.00527901, 0.00548796, 0.00570624, 0.00441722, 0.00456038, 0.00471956, 0.00489355, 0.00508048, 0.00527901, 0.00548796, 0.00570624, 0.00441722, 0.00456038, 0.00471956, 0.00489355, 0.00508048, 0.00527901, 0.00548796, 0.00570624, 0.00441722, 0.00456038, 0.00471956, 0.00489355, 0.00508048, 0.00527901, 0.00548796, 0.00570624, 0.00441722, 0.00456038, 0.00471956, 0.00489355, 0.00508048, 0.00527901, 0.00548796, 0.00570624, 0.00441722, 0.00456038, 0.00471956, 0.00489355, 0.00508048, 0.00527901, 0.00548796, 0.00570624, 0.00441722, 0.00456038, 0.00471956, 0.00489355, 0.00508048, 0.00527901, 0.00548796, 0.00570624, 0.00441722, 0.00456038, 0.00471956, 0.00489355, 0.00508048, 0.00527901, 0.00548796, 0.00570624, 0.00441722, 0.00456038, 0.00471956, 0.00489355, 0.00508048, 0.00527901, 0.00548796, 0.00570624, 0.00441722, 0.00456038, 0.00471956, 0.00489355, 0.00508048, 0.00527901, 0.00548796, 0.00570624, 0.00441722, 0.00456038, 0.00471956, 0.00489355, ... 0.00441135, 0.00455465, 0.00471356, 0.00488728, 0.0050738 , 0.00527221, 0.00548102, 0.00569877, 0.00441135, 0.00455465, 0.00471356, 0.00488728, 0.0050738 , 0.00527221, 0.00548102, 0.00569877, 0.00441135, 0.00455465, 0.00471356, 0.00488728, 0.0050738 , 0.00527221, 0.00548102, 0.00569877, 0.00441135, 0.00455465, 0.00471356, 0.00488728, 0.0050738 , 0.00527221, 0.00548102, 0.00569877, 0.00441135, 0.00455465, 0.00471356, 0.00488728, 0.0050738 , 0.00527221, 0.00548102, 0.00569877, 0.00441135, 0.00455465, 0.00471356, 0.00488728, 0.0050738 , 0.00527221, 0.00548102, 0.00569877, 0.00441135, 0.00455465, 0.00471356, 0.00488728, 0.0050738 , 0.00527221, 0.00548102, 0.00569877, 0.00441135, 0.00455465, 0.00471356, 0.00488728, 0.0050738 , 0.00527221, 0.00548102, 0.00569877, 0.00441135, 0.00455465, 0.00471356, 0.00488728, 0.0050738 , 0.00527221, 0.00548102, 0.00569877, 0.00441135, 0.00455465, 0.00471356, 0.00488728, 0.0050738 , 0.00527221, 0.00548102, 0.00569877, 0.00441135, 0.00455465, 0.00471356, 0.00488728, 0.0050738 , 0.00527221, 0.00548102, 0.00569877, 0.00441135, 0.00455465, 0.00471356, 0.00488728, 0.0050738 , 0.00527221, 0.00548102, 0.00569877]]) - dopplerRateCoefficients(burst_maps, burst, coefficients)float64-2.893e+03 6.764e+05 ... -2.047e+12
array([[[-2.89324661e+03, 6.76360020e+05, -1.59625036e+08, 4.40828162e+10, -1.59565926e+13], [-2.79956608e+03, 6.33177097e+05, -1.42609427e+08, 3.50473505e+10, -9.63895974e+12], [-2.70225921e+03, 5.90284932e+05, -1.27313313e+08, 2.89307471e+10, -6.71840373e+12], ..., [-2.41246486e+03, 4.71851427e+05, -8.98571193e+07, 1.73977735e+10, -3.13356188e+12], [-2.31770517e+03, 4.36486510e+05, -7.97695164e+07, 1.47727710e+10, -2.52342311e+12], [-2.22629815e+03, 4.03743770e+05, -7.08296359e+07, 1.25678361e+10, -2.04699498e+12]]])
- numberOfEstimates :
- 776
<xarray.DatasetView> Size: 127kB Dimensions: (burst_maps: 1, burst: 776, coefficients: 5) Coordinates: * burst (burst) int64 6kB 0 1 2 3 4 ... 772 773 774 775 Dimensions without coordinates: burst_maps, coefficients Data variables: timeOfDopplerRateEstimate (burst_maps, burst) <U27 84kB '2020-02-14T11:5... dopplerRateReferenceTime (burst_maps, burst) float64 6kB 0.004417 ... 0... dopplerRateCoefficients (burst_maps, burst, coefficients) float64 31kB ... Attributes: numberOfEstimates: 776dopplerRate- pixel: 786
- pixel(pixel)int64-14 9 32 55 ... 17995 18018 18041
array([ -14, 9, 32, ..., 17995, 18018, 18041])
- angles(pixel)float6426.87 26.91 26.95 ... 50.93 50.95
- units :
- deg
array([26.87371332, 26.91337928, 26.95302158, 26.99264021, 27.03223515, 27.07180641, 27.11135395, 27.15087779, 27.1903779 , 27.22985429, 27.26930693, 27.30873583, 27.34814096, 27.38752233, 27.42687993, 27.46621373, 27.50552375, 27.54480996, 27.58407236, 27.62331095, 27.6625257 , 27.70171662, 27.7408837 , 27.78002692, 27.81914629, 27.85824179, 27.89731341, 27.93636115, 27.975385 , 28.01438495, 28.05336099, 28.09231312, 28.13124133, 28.17014562, 28.20902597, 28.24788238, 28.28671484, 28.32552334, 28.36430788, 28.40306846, 28.44180506, 28.48051768, 28.51920631, 28.55787095, 28.59651158, 28.63512821, 28.67372083, 28.71228943, 28.75083401, 28.78935455, 28.82785106, 28.86632353, 28.90477195, 28.94319632, 28.98159663, 29.01997288, 29.05832507, 29.09665318, 29.13495721, 29.17323716, 29.21149302, 29.24972478, 29.28793246, 29.32611602, 29.36427549, 29.40241084, 29.44052208, 29.4786092 , 29.51667219, 29.55471106, 29.5927258 , 29.6307164 , 29.66868286, 29.70662518, 29.74454335, 29.78243737, 29.82030724, 29.85815295, 29.8959745 , 29.93377188, 29.9715451 , 30.00929415, 30.04701903, 30.08471973, 30.12239625, 30.16004858, 30.19767674, 30.2352807 , 30.27286048, 30.31041606, 30.34794745, 30.38545464, 30.42293763, 30.46039642, 30.49783101, 30.53524139, 30.57262756, 30.60998953, 30.64732728, 30.68464082, ... 48.71689308, 48.74126538, 48.76561973, 48.78995613, 48.8142746 , 48.83857516, 48.86285781, 48.88712259, 48.91136949, 48.93559854, 48.95980975, 48.98400313, 49.00817871, 49.03233649, 49.05647649, 49.08059873, 49.10470321, 49.12878996, 49.152859 , 49.17691032, 49.20094396, 49.22495992, 49.24895823, 49.27293888, 49.29690191, 49.32084732, 49.34477513, 49.36868536, 49.39257802, 49.41645312, 49.44031068, 49.46415071, 49.48797323, 49.51177826, 49.53556581, 49.55933589, 49.58308852, 49.60682371, 49.63054148, 49.65424184, 49.67792482, 49.70159041, 49.72523864, 49.74886953, 49.77248308, 49.79607932, 49.81965826, 49.8432199 , 49.86676427, 49.89029139, 49.91380126, 49.9372939 , 49.96076933, 49.98422756, 50.00766861, 50.03109249, 50.05449921, 50.07788879, 50.10126125, 50.1246166 , 50.14795485, 50.17127603, 50.19458013, 50.21786719, 50.24113721, 50.26439021, 50.2876262 , 50.3108452 , 50.33404722, 50.35723228, 50.38040039, 50.40355157, 50.42668583, 50.44980318, 50.47290365, 50.49598725, 50.51905398, 50.54210387, 50.56513693, 50.58815317, 50.61115261, 50.63413527, 50.65710115, 50.68005028, 50.70298267, 50.72589833, 50.74879727, 50.77167952, 50.79454508, 50.81739398, 50.84022622, 50.86304182, 50.88584079, 50.90862316, 50.93138893, 50.9541414 ])
- pixelFirstAnglesValue :
- 18041
- stepSize :
- -23
- numberOfValues :
- 786
<xarray.DatasetView> Size: 13kB Dimensions: (pixel: 786) Coordinates: * pixel (pixel) int64 6kB -14 9 32 55 78 ... 17949 17972 17995 18018 18041 Data variables: angles (pixel) float64 6kB 26.87 26.91 26.95 26.99 ... 50.91 50.93 50.95 Attributes: pixelFirstAnglesValue: 18041 stepSize: -23 numberOfValues: 786incidenceAngles- sarCalibrationType: 3
- pole: 2
- pixel: 786
- sarCalibrationType(sarCalibrationType)<U12'Beta Nought' ... 'Sigma Nought'
array(['Beta Nought', 'Gamma', 'Sigma Nought'], dtype='<U12')
- pole(pole)<U2'HH' 'HV'
array(['HH', 'HV'], dtype='<U2')
- pixel(pixel)int64-14 9 32 55 ... 17995 18018 18041
array([ -14, 9, 32, ..., 17995, 18018, 18041])
- lookup_tables(pixel, sarCalibrationType, pole)float642.731e+09 2.731e+09 ... 5.693e+08
- pixelFirstLutValue :
- 18041
- stepSize :
- -23
- numberOfValues :
- 786
- offset :
- 0.0
array([[[2.73082741e+09, 2.73082741e+09], [2.21500277e+09, 2.21500277e+09], [3.51619892e+09, 3.51619892e+09]], [[2.72612253e+09, 2.72612253e+09], [2.21298095e+09, 2.21298095e+09], [3.51127167e+09, 3.51127167e+09]], [[2.72142141e+09, 2.72142141e+09], [2.21095918e+09, 2.21095918e+09], [3.50634781e+09, 3.50634781e+09]], ..., [[2.59798046e+08, 2.59798046e+08], [5.10917558e+08, 5.10917558e+08], [5.73176915e+08, 5.73176915e+08]], [[2.58573945e+08, 2.58573945e+08], [5.09382251e+08, 5.09382251e+08], [5.71253676e+08, 5.71253676e+08]], [[2.57354887e+08, 2.57354887e+08], [5.07851527e+08, 5.07851527e+08], [5.69337080e+08, 5.69337080e+08]]])
<xarray.DatasetView> Size: 44kB Dimensions: (sarCalibrationType: 3, pole: 2, pixel: 786) Coordinates: * sarCalibrationType (sarCalibrationType) <U12 144B 'Beta Nought' ... 'Sig... * pole (pole) <U2 16B 'HH' 'HV' * pixel (pixel) int64 6kB -14 9 32 55 ... 17995 18018 18041 Data variables: lookup_tables (pixel, sarCalibrationType, pole) float64 38kB 2.731e...lookupTables- pole: 2
- sarCalibrationType: 3
- pixel: 786
- sarCalibrationType(sarCalibrationType)<U12'Beta Nought' ... 'Sigma Nought'
array(['Beta Nought', 'Gamma', 'Sigma Nought'], dtype='<U12')
- pixelFirstNoiseValue()int6418041
array(18041)
- stepSize()int64-23
array(-23)
- pole(pole)<U2'HH' 'HV'
array(['HH', 'HV'], dtype='<U2')
- pixel(pixel)int64-14 9 32 55 ... 17995 18018 18041
array([ -14, 9, 32, ..., 17995, 18018, 18041])
- noiseLevelValues(pole, sarCalibrationType, pixel)float64-33.18 -33.25 ... -33.86 -33.6
- units :
- dB
array([[[-33.18246722, -33.25351197, -33.32550201, ..., -30.89473432, -30.61496587, -30.3483882 ], [-32.27326558, -32.34783499, -32.42335129, ..., -33.8318838 , -33.55955633, -33.30043163], [-34.28025818, -34.35270257, -34.42609398, ..., -34.33126243, -34.05740833, -33.7967587 ]], [[-32.91420891, -32.9848524 , -33.05643046, ..., -30.69766432, -30.41789288, -30.15131232], [-32.00500727, -32.07917543, -32.15427974, ..., -33.6348138 , -33.36248334, -33.10335575], [-34.01199987, -34.084043 , -34.15702243, ..., -34.13419243, -33.86033534, -33.59968282]]])
- numberOfValues :
- 786
<xarray.DatasetView> Size: 44kB Dimensions: (pole: 2, sarCalibrationType: 3, pixel: 786) Coordinates: * sarCalibrationType (sarCalibrationType) <U12 144B 'Beta Nought' ... 'S... pixelFirstNoiseValue int64 8B 18041 stepSize int64 8B -23 * pole (pole) <U2 16B 'HH' 'HV' * pixel (pixel) int64 6kB -14 9 32 55 ... 17995 18018 18041 Data variables: noiseLevelValues (pole, sarCalibrationType, pixel) float64 38kB -33.... Attributes: numberOfValues: 786referenceNoiseLevel- pole: 2
- beam: 8
- sarCalibrationType: 3
- coefficients: 797
- beam(beam)object'SC-10' 'SC-3' ... 'SC-8' 'SC-9'
array(['SC-10', 'SC-3', 'SC-4', 'SC-5', 'SC-6', 'SC-7', 'SC-8', 'SC-9'], dtype=object) - sarCalibrationType(sarCalibrationType)object'Beta Nought' ... 'Sigma Nought'
array(['Beta Nought', 'Gamma', 'Sigma Nought'], dtype=object)
- pixelFirstNoiseValue(beam)int642408 18041 15757 ... 9088 6861 4634
array([ 2408, 18041, 15757, 13533, 11310, 9088, 6861, 4634])
- stepSize(beam)int64-4 -3 -3 -3 -3 -3 -3 -3
array([-4, -3, -3, -3, -3, -3, -3, -3])
- pole(pole)<U2'HH' 'HV'
array(['HH', 'HV'], dtype='<U2')
- noiseLevelValues(pole, beam, sarCalibrationType, coefficients)float64-31.46 -31.49 -31.52 ... nan nan
- units :
- dB
array([[[[-31.46339334, -31.49003467, -31.51684044, ..., nan, nan, nan], [-30.93686837, -30.96285726, -30.98901066, ..., nan, nan, nan], [-32.72120045, -32.74755494, -32.77407395, ..., nan, nan, nan]], [[-30.3483882 , -30.38224518, -30.41636818, ..., -31.8303057 , -31.81202785, -31.79380117], [-33.30043163, -33.3333158 , -33.3664662 , ..., -34.06755318, -34.04844026, -34.0293786 ], [-33.7967587 , -33.82984168, -33.86319092, ..., -34.7302976 , -34.71140435, -34.69256239]], [[-30.06133478, -30.09067221, -30.12020916, ..., nan, nan, nan], [-32.32594267, -32.35444018, -32.38313738, ..., nan, nan, nan], [-32.98152388, -33.0102403 , -33.03915643, ..., nan, nan, nan]], ... [[-29.63826662, -29.66844506, -29.69883467, ..., nan, nan, nan], [-30.32265223, -30.35222102, -30.38200105, ..., nan, nan, nan], [-31.51246088, -31.54228687, -31.57232411, ..., nan, nan, nan]], [[-30.30858914, -30.33934748, -30.37032521, ..., nan, nan, nan], [-30.55881211, -30.58900881, -30.61942497, ..., nan, nan, nan], [-31.94245282, -31.9729142 , -32.00359504, ..., nan, nan, nan]], [[-30.68286568, -30.70477002, -30.72678541, ..., nan, nan, nan], [-30.53126224, -30.55264442, -30.57413769, ..., nan, nan, nan], [-32.11353671, -32.1351891 , -32.15695259, ..., nan, nan, nan]]]])
<xarray.DatasetView> Size: 306kB Dimensions: (pole: 2, beam: 8, sarCalibrationType: 3, coefficients: 797) Coordinates: * beam (beam) object 64B 'SC-10' 'SC-3' ... 'SC-8' 'SC-9' * sarCalibrationType (sarCalibrationType) object 24B 'Beta Nought' ... '... pixelFirstNoiseValue (beam) int64 64B 2408 18041 15757 ... 9088 6861 4634 stepSize (beam) int64 64B -4 -3 -3 -3 -3 -3 -3 -3 * pole (pole) <U2 16B 'HH' 'HV' Dimensions without coordinates: coefficients Data variables: noiseLevelValues (pole, beam, sarCalibrationType, coefficients) float64 306kB ...perBeamReferenceNoiseLevel- pole: 2
- beam: 8
- coefficients: 503
- beam(beam)object'SC-10' 'SC-3' ... 'SC-8' 'SC-9'
array(['SC-10', 'SC-3', 'SC-4', 'SC-5', 'SC-6', 'SC-7', 'SC-8', 'SC-9'], dtype=object) - stepSize()int641
array(1)
- pole(pole)<U2'HH' 'HV'
array(['HH', 'HV'], dtype='<U2')
- noiseLevelScalingValues(pole, beam, coefficients)float6418.03 17.83 17.62 ... 20.19 20.41
- units :
- dB
array([[[18.03259361, 17.82567267, 17.61875174, ..., 17.97887603, 18.18579697, 18.39271791], [45.45929328, 44.50603098, 43.55276869, ..., 45.2988543 , 46.25211659, 47.20537889], [37.51680432, 36.7940541 , 36.29863671, ..., 37.3270023 , 38.24842871, 39.16985513], ..., [25.36641984, 25.05976688, 24.75311392, ..., 25.43286163, 25.73951459, nan], [22.51885011, 22.22411439, 21.96542158, ..., 22.32120948, 22.6159452 , 22.91068092], [20.29084046, 20.07540805, 19.85997565, ..., 19.97516162, 20.19059403, 20.40602643]], [[18.03290657, 17.82598119, 17.6190558 , ..., 17.97918783, 18.18611322, 18.39303861], [45.45929328, 44.50603098, 43.55276869, ..., 45.2988543 , 46.25211659, 47.20537889], [37.51680432, 36.7940541 , 36.29863671, ..., 37.3270023 , 38.24842871, 39.16985513], ..., [25.36641984, 25.05976688, 24.75311392, ..., 25.43286163, 25.73951459, nan], [22.51885011, 22.22411439, 21.96542158, ..., 22.32120948, 22.6159452 , 22.91068092], [20.29084046, 20.07540805, 19.85997565, ..., 19.97516162, 20.19059403, 20.40602643]]])
<xarray.DatasetView> Size: 64kB Dimensions: (pole: 2, beam: 8, coefficients: 503) Coordinates: * beam (beam) object 64B 'SC-10' 'SC-3' ... 'SC-8' 'SC-9' stepSize int64 8B 1 * pole (pole) <U2 16B 'HH' 'HV' Dimensions without coordinates: coefficients Data variables: noiseLevelScalingValues (pole, beam, coefficients) float64 64kB 18.03 .....azimuthNoiseLevelScaling
<xarray.DatasetView> Size: 0B Dimensions: () Data variables: *empty*noiseLevels
<xarray.DatasetView> Size: 0B Dimensions: () Data variables: *empty*lookupTables- pole: 2
- band: 1
- y: 19127
- x: 18042
- band(band)int641
array([1])
- spatial_ref()int640
- crs_wkt :
- GEOGCS["WGS 84",DATUM["WGS_1984",SPHEROID["WGS 84",6378137,298.257223563,AUTHORITY["EPSG","7030"]],AUTHORITY["EPSG","6326"]],PRIMEM["Greenwich",0,AUTHORITY["EPSG","8901"]],UNIT["degree",0.0174532925199433,AUTHORITY["EPSG","9122"]],AXIS["Latitude",NORTH],AXIS["Longitude",EAST],AUTHORITY["EPSG","4326"]]
- semi_major_axis :
- 6378137.0
- semi_minor_axis :
- 6356752.314245179
- inverse_flattening :
- 298.257223563
- reference_ellipsoid_name :
- WGS 84
- longitude_of_prime_meridian :
- 0.0
- prime_meridian_name :
- Greenwich
- geographic_crs_name :
- WGS 84
- horizontal_datum_name :
- World Geodetic System 1984
- grid_mapping_name :
- latitude_longitude
- spatial_ref :
- GEOGCS["WGS 84",DATUM["WGS_1984",SPHEROID["WGS 84",6378137,298.257223563,AUTHORITY["EPSG","7030"]],AUTHORITY["EPSG","6326"]],PRIMEM["Greenwich",0,AUTHORITY["EPSG","8901"]],UNIT["degree",0.0174532925199433,AUTHORITY["EPSG","9122"]],AXIS["Latitude",NORTH],AXIS["Longitude",EAST],AUTHORITY["EPSG","4326"]]
- GeoTransform :
- 0.0 1.0 0.0 0.0 0.0 1.0
- gcps :
- {"type": "FeatureCollection", "features": [{"type": "Feature", "properties": {"id": "1", "info": "", "row": 0.5, "col": 0.5}, "geometry": {"type": "Point", "coordinates": [-89.49513011173734, 49.257845406661716, 229.9309956651041]}}, {"type": "Feature", "properties": {"id": "2", "info": "", "row": 0.5, "col": 1503.9166259765625}, "geometry": {"type": "Point", "coordinates": [-89.08619582162856, 49.22049274976272, 229.9309956651041]}}, {"type": "Feature", "properties": {"id": "3", "info": "", "row": 0.5, "col": 3007.333251953125}, "geometry": {"type": "Point", "coordinates": [-88.67788853140567, 49.18169682175015, 229.9309956651041]}}, {"type": "Feature", "properties": {"id": "4", "info": "", "row": 0.5, "col": 4510.75}, "geometry": {"type": "Point", "coordinates": [-88.27023034008236, 49.14146183950849, 229.9309956651041]}}, {"type": "Feature", "properties": {"id": "5", "info": "", "row": 0.5, "col": 6014.16650390625}, "geometry": {"type": "Point", "coordinates": [-87.86324307026494, 49.09979216257854, 229.9309956651041]}}, {"type": "Feature", "properties": {"id": "6", "info": "", "row": 0.5, "col": 7517.5830078125}, "geometry": {"type": "Point", "coordinates": [-87.45694746967007, 49.056692205575004, 229.9309956651041]}}, {"type": "Feature", "properties": {"id": "7", "info": "", "row": 0.5, "col": 9021.0}, "geometry": {"type": "Point", "coordinates": [-87.05136479004186, 49.01216659833742, 229.9309956651041]}}, {"type": "Feature", "properties": {"id": "8", "info": "", "row": 0.5, "col": 10524.4169921875}, "geometry": {"type": "Point", "coordinates": [-86.64651572236808, 48.966220076295635, 229.9309956651041]}}, {"type": "Feature", "properties": {"id": "9", "info": "", "row": 0.5, "col": 12027.833984375}, "geometry": {"type": "Point", "coordinates": [-86.24242065497792, 48.91885750474096, 229.9309956651041]}}, {"type": "Feature", "properties": {"id": "10", "info": "", "row": 0.5, "col": 13531.2509765625}, "geometry": {"type": "Point", "coordinates": [-85.8390996671337, 48.870083876426314, 229.9309956651041]}}, {"type": "Feature", "properties": {"id": "11", "info": "", "row": 0.5, "col": 15034.66796875}, "geometry": {"type": "Point", "coordinates": [-85.43657252298104, 48.81990430912944, 229.9309956651041]}}, {"type": "Feature", "properties": {"id": "12", "info": "", "row": 0.5, "col": 16538.083984375}, "geometry": {"type": "Point", "coordinates": [-85.03485892671077, 48.76832407716551, 229.9309956651041]}}, {"type": "Feature", "properties": {"id": "13", "info": "", "row": 0.5, "col": 18041.5}, "geometry": {"type": "Point", "coordinates": [-84.63397773377159, 48.71534850877886, 229.9309956651041]}}, {"type": "Feature", "properties": {"id": "14", "info": "", "row": 1594.3333740234375, "col": 0.5}, "geometry": {"type": "Point", "coordinates": [-89.5557630605347, 48.97494951923606, 229.9309956651041]}}, {"type": "Feature", "properties": {"id": "15", "info": "", "row": 1594.3333740234375, "col": 1503.9166259765625}, "geometry": {"type": "Point", "coordinates": [-89.14915607270999, 48.937549400122954, 229.9309956651041]}}, {"type": "Feature", "properties": {"id": "16", "info": "", "row": 1594.3333740234375, "col": 3007.333251953125}, "geometry": {"type": "Point", "coordinates": [-88.74316695698685, 48.898720322899095, 229.9309956651041]}}, {"type": "Feature", "properties": {"id": "17", "info": "", "row": 1594.3333740234375, "col": 4510.75}, "geometry": {"type": "Point", "coordinates": [-88.33781724713606, 48.85846644141123, 229.9309956651041]}}, {"type": "Feature", "properties": {"id": "18", "info": "", "row": 1594.3333740234375, "col": 6014.16650390625}, "geometry": {"type": "Point", "coordinates": [-87.93312820881941, 48.81679204849093, 229.9309956651041]}}, {"type": "Feature", "properties": {"id": "19", "info": "", "row": 1594.3333740234375, "col": 7517.5830078125}, "geometry": {"type": "Point", "coordinates": [-87.52912004618346, 48.77370148850655, 229.9309956651041]}}, {"type": "Feature", "properties": {"id": "20", "info": "", "row": 1594.3333740234375, "col": 9021.0}, "geometry": {"type": "Point", "coordinates": [-87.12581347184977, 48.729199317578235, 229.9309956651041]}}, {"type": "Feature", "properties": {"id": "21", "info": "", "row": 1594.3333740234375, "col": 10524.4169921875}, "geometry": {"type": "Point", "coordinates": [-86.72322864844088, 48.68329019400043, 229.9309956651041]}}, {"type": "Feature", "properties": {"id": "22", "info": "", "row": 1594.3333740234375, "col": 12027.833984375}, "geometry": {"type": "Point", "coordinates": [-86.32138544565176, 48.635978902620465, 229.9309956651041]}}, {"type": "Feature", "properties": {"id": "23", "info": "", "row": 1594.3333740234375, "col": 13531.2509765625}, "geometry": {"type": "Point", "coordinates": [-85.92030343385981, 48.58727035249082, 229.9309956651041]}}, {"type": "Feature", "properties": {"id": "24", "info": "", "row": 1594.3333740234375, "col": 15034.66796875}, "geometry": {"type": "Point", "coordinates": [-85.52000187833313, 48.537169574513015, 229.9309956651041]}}, {"type": "Feature", "properties": {"id": "25", "info": "", "row": 1594.3333740234375, "col": 16538.083984375}, "geometry": {"type": "Point", "coordinates": [-85.12049999353934, 48.48568175301253, 229.9309956651041]}}, {"type": "Feature", "properties": {"id": "26", "info": "", "row": 1594.3333740234375, "col": 18041.5}, "geometry": {"type": "Point", "coordinates": [-84.72181615839237, 48.432812123328425, 229.9309956651041]}}, {"type": "Feature", "properties": {"id": "27", "info": "", "row": 3188.166748046875, "col": 0.5}, "geometry": {"type": "Point", "coordinates": [-89.61614106487791, 48.692030274166925, 229.9309956651041]}}, {"type": "Feature", "properties": {"id": "28", "info": "", "row": 3188.166748046875, "col": 1503.9166259765625}, "geometry": {"type": "Point", "coordinates": [-89.21182574759585, 48.654581351298354, 229.9309956651041]}}, {"type": "Feature", "properties": {"id": "29", "info": "", "row": 3188.166748046875, "col": 3007.333251953125}, "geometry": {"type": "Point", "coordinates": [-88.8081193709017, 48.615717625234296, 229.9309956651041]}}, {"type": "Feature", "properties": {"id": "30", "info": "", "row": 3188.166748046875, "col": 4510.75}, "geometry": {"type": "Point", "coordinates": [-88.40504291917289, 48.57544318822219, 229.9309956651041]}}, {"type": "Feature", "properties": {"id": "31", "info": "", "row": 3188.166748046875, "col": 6014.16650390625}, "geometry": {"type": "Point", "coordinates": [-88.0026171168734, 48.5337622679485, 229.9309956651041]}}, {"type": "Feature", "properties": {"id": "32", "info": "", "row": 3188.166748046875, "col": 7517.5830078125}, "geometry": {"type": "Point", "coordinates": [-87.60086163968268, 48.490679140172645, 229.9309956651041]}}, {"type": "Feature", "properties": {"id": "33", "info": "", "row": 3188.166748046875, "col": 9021.0}, "geometry": {"type": "Point", "coordinates": [-87.19979667606997, 48.446198289048965, 229.9309956651041]}}, {"type": "Feature", "properties": {"id": "34", "info": "", "row": 3188.166748046875, "col": 10524.4169921875}, "geometry": {"type": "Point", "coordinates": [-86.79944187497046, 48.4003242975949, 229.9309956651041]}}, {"type": "Feature", "properties": {"id": "35", "info": "", "row": 3188.166748046875, "col": 12027.833984375}, "geometry": {"type": "Point", "coordinates": [-86.39981660155264, 48.353061872142185, 229.9309956651041]}}, {"type": "Feature", "properties": {"id": "36", "info": "", "row": 3188.166748046875, "col": 13531.2509765625}, "geometry": {"type": "Point", "coordinates": [-86.00093993117915, 48.30441584007641, 229.9309956651041]}}, {"type": "Feature", "properties": {"id": "37", "info": "", "row": 3188.166748046875, "col": 15034.66796875}, "geometry": {"type": "Point", "coordinates": [-85.60283064385914, 48.254391147560696, 229.9309956651041]}}, {"type": "Feature", "properties": {"id": "38", "info": "", "row": 3188.166748046875, "col": 16538.083984375}, "geometry": {"type": "Point", "coordinates": [-85.20550747720297, 48.20299289110697, 229.9309956651041]}}, {"type": "Feature", "properties": {"id": "39", "info": "", "row": 3188.166748046875, "col": 18041.5}, "geometry": {"type": "Point", "coordinates": [-84.8089883463828, 48.15022621544867, 229.9309956651041]}}, {"type": "Feature", "properties": {"id": "40", "info": "", "row": 4782.0, "col": 0.5}, "geometry": {"type": "Point", "coordinates": [-89.67627021453514, 48.40908777748061, 229.9309956651041]}}, {"type": "Feature", "properties": {"id": "41", "info": "", "row": 4782.0, "col": 1503.9166259765625}, "geometry": {"type": "Point", "coordinates": [-89.27421163413045, 48.37158873824278, 229.9309956651041]}}, {"type": "Feature", "properties": {"id": "42", "info": "", "row": 4782.0, "col": 3007.333251953125}, "geometry": {"type": "Point", "coordinates": [-88.8727532528803, 48.33268889588749, 229.9309956651041]}}, {"type": "Feature", "properties": {"id": "43", "info": "", "row": 4782.0, "col": 4510.75}, "geometry": {"type": "Point", "coordinates": [-88.4719155211201, 48.29239228246066, 229.9309956651041]}}, {"type": "Feature", "properties": {"id": "44", "info": "", "row": 4782.0, "col": 6014.16650390625}, "geometry": {"type": "Point", "coordinates": [-88.07171863727166, 48.2507030620134, 229.9309956651041]}}, {"type": "Feature", "properties": {"id": "45", "info": "", "row": 4782.0, "col": 7517.5830078125}, "geometry": {"type": "Point", "coordinates": [-87.67218176318195, 48.20762544328599, 229.9309956651041]}}, {"type": "Feature", "properties": {"id": "46", "info": "", "row": 4782.0, "col": 9021.0}, "geometry": {"type": "Point", "coordinates": [-87.27332457765132, 48.16316384016692, 229.9309956651041]}}, {"type": "Feature", "properties": {"id": "47", "info": "", "row": 4782.0, "col": 10524.4169921875}, "geometry": {"type": "Point", "coordinates": [-86.87516623008932, 48.11732276219317, 229.9309956651041]}}, {"type": "Feature", "properties": {"id": "48", "info": "", "row": 4782.0, "col": 12027.833984375}, "geometry": {"type": "Point", "coordinates": [-86.47772559482482, 48.070106839052826, 229.9309956651041]}}, {"type": "Feature", "properties": {"id": "49", "info": "", "row": 4782.0, "col": 13531.2509765625}, "geometry": {"type": "Point", "coordinates": [-86.0810212656256, 48.02152081843423, 229.9309956651041]}}, {"type": "Feature", "properties": {"id": "50", "info": "", "row": 4782.0, "col": 15034.66796875}, "geometry": {"type": "Point", "coordinates": [-85.68507155037685, 47.97156956382683, 229.9309956651041]}}, {"type": "Feature", "properties": {"id": "51", "info": "", "row": 4782.0, "col": 16538.083984375}, "geometry": {"type": "Point", "coordinates": [-85.28989472239256, 47.920258086049245, 229.9309956651041]}}, {"type": "Feature", "properties": {"id": "52", "info": "", "row": 4782.0, "col": 18041.5}, "geometry": {"type": "Point", "coordinates": [-84.89550824540235, 47.86759144144497, 229.9309956651041]}}, {"type": "Feature", "properties": {"id": "53", "info": "", "row": 6375.83349609375, "col": 0.5}, "geometry": {"type": "Point", "coordinates": [-89.73615646401348, 48.12612204921231, 229.9309956651041]}}, {"type": "Feature", "properties": {"id": "54", "info": "", "row": 6375.83349609375, "col": 1503.9166259765625}, "geometry": {"type": "Point", "coordinates": [-89.33632036676826, 48.088571609040734, 229.9309956651041]}}, {"type": "Feature", "properties": {"id": "55", "info": "", "row": 6375.83349609375, "col": 3007.333251953125}, "geometry": {"type": "Point", "coordinates": [-88.93707591138033, 48.049634214163405, 229.9309956651041]}}, {"type": "Feature", "properties": {"id": "56", "info": "", "row": 6375.83349609375, "col": 4510.75}, "geometry": {"type": "Point", "coordinates": [-88.53844302912724, 48.00931383779501, 229.9309956651041]}}, {"type": "Feature", "properties": {"id": "57", "info": "", "row": 6375.83349609375, "col": 6014.16650390625}, "geometry": {"type": "Point", "coordinates": [-88.14044140670177, 47.96761458178061, 229.9309956651041]}}, {"type": "Feature", "properties": {"id": "58", "info": "", "row": 6375.83349609375, "col": 7517.5830078125}, "geometry": {"type": "Point", "coordinates": [-87.74308970656433, 47.92454058941275, 229.9309956651041]}}, {"type": "Feature", "properties": {"id": "59", "info": "", "row": 6375.83349609375, "col": 9021.0}, "geometry": {"type": "Point", "coordinates": [-87.34640711179964, 47.880096205956484, 229.9309956651041]}}, {"type": "Feature", "properties": {"id": "60", "info": "", "row": 6375.83349609375, "col": 10524.4169921875}, "geometry": {"type": "Point", "coordinates": [-86.95041228574884, 47.83428586918124, 229.9309956651041]}}, {"type": "Feature", "properties": {"id": "61", "info": "", "row": 6375.83349609375, "col": 12027.833984375}, "geometry": {"type": "Point", "coordinates": [-86.55512362543597, 47.78711413397857, 229.9309956651041]}}, {"type": "Feature", "properties": {"id": "62", "info": "", "row": 6375.83349609375, "col": 13531.2509765625}, "geometry": {"type": "Point", "coordinates": [-86.16055925602365, 47.7385856702489, 229.9309956651041]}}, {"type": "Feature", "properties": {"id": "63", "info": "", "row": 6375.83349609375, "col": 15034.66796875}, "geometry": {"type": "Point", "coordinates": [-85.76673702564094, 47.68870526076462, 229.9309956651041]}}, {"type": "Feature", "properties": {"id": "64", "info": "", "row": 6375.83349609375, "col": 16538.083984375}, "geometry": {"type": "Point", "coordinates": [-85.37367475601741, 47.63747783277454, 229.9309956651041]}}, {"type": "Feature", "properties": {"id": "65", "info": "", "row": 6375.83349609375, "col": 18041.5}, "geometry": {"type": "Point", "coordinates": [-84.98138947116806, 47.584908356356244, 229.9309956651041]}}, {"type": "Feature", "properties": {"id": "66", "info": "", "row": 7969.6669921875, "col": 0.5}, "geometry": {"type": "Point", "coordinates": [-89.79580559777784, 47.84313321473812, 229.9309956651041]}}, {"type": "Feature", "properties": {"id": "67", "info": "", "row": 7969.6669921875, "col": 1503.9166259765625}, "geometry": {"type": "Point", "coordinates": [-89.39815839107621, 47.80553011651249, 229.9309956651041]}}, {"type": "Feature", "properties": {"id": "68", "info": "", "row": 7969.6669921875, "col": 3007.333251953125}, "geometry": {"type": "Point", "coordinates": [-89.00109444732907, 47.76655376340877, 229.9309956651041]}}, {"type": "Feature", "properties": {"id": "69", "info": "", "row": 7969.6669921875, "col": 4510.75}, "geometry": {"type": "Point", "coordinates": [-88.60463319304549, 47.72620807111928, 229.9309956651041]}}, {"type": "Feature", "properties": {"id": "70", "info": "", "row": 7969.6669921875, "col": 6014.16650390625}, "geometry": {"type": "Point", "coordinates": [-88.2087938174399, 47.684497080710045, 229.9309956651041]}}, {"type": "Feature", "properties": {"id": "71", "info": "", "row": 7969.6669921875, "col": 7517.5830078125}, "geometry": {"type": "Point", "coordinates": [-87.81359449724683, 47.64142487151747, 229.9309956651041]}}, {"type": "Feature", "properties": {"id": "72", "info": "", "row": 7969.6669921875, "col": 9021.0}, "geometry": {"type": "Point", "coordinates": [-87.4190539333511, 47.59699572177605, 229.9309956651041]}}, {"type": "Feature", "properties": {"id": "73", "info": "", "row": 7969.6669921875, "col": 10524.4169921875}, "geometry": {"type": "Point", "coordinates": [-87.02519031633258, 47.55121399918047, 229.9309956651041]}}, {"type": "Feature", "properties": {"id": "74", "info": "", "row": 7969.6669921875, "col": 12027.833984375}, "geometry": {"type": "Point", "coordinates": [-86.63202157872571, 47.504084185583395, 229.9309956651041]}}, {"type": "Feature", "properties": {"id": "75", "info": "", "row": 7969.6669921875, "col": 13531.2509765625}, "geometry": {"type": "Point", "coordinates": [-86.23956538962527, 47.455610874942074, 229.9309956651041]}}, {"type": "Feature", "properties": {"id": "76", "info": "", "row": 7969.6669921875, "col": 15034.66796875}, "geometry": {"type": "Point", "coordinates": [-85.84783914976485, 47.40579877125552, 229.9309956651041]}}, {"type": "Feature", "properties": {"id": "77", "info": "", "row": 7969.6669921875, "col": 16538.083984375}, "geometry": {"type": "Point", "coordinates": [-85.45686024105811, 47.35465272019128, 229.9309956651041]}}, {"type": "Feature", "properties": {"id": "78", "info": "", "row": 7969.6669921875, "col": 18041.5}, "geometry": {"type": "Point", "coordinates": [-85.0666452593968, 47.302177607646755, 229.9309956651041]}}, {"type": "Feature", "properties": {"id": "79", "info": "", "row": 9563.5, "col": 0.5}, "geometry": {"type": "Point", "coordinates": [-89.85522324851848, 47.56012144121747, 229.9309956651041]}}, {"type": "Feature", "properties": {"id": "80", "info": "", "row": 9563.5, "col": 1503.9166259765625}, "geometry": {"type": "Point", "coordinates": [-89.45973198287543, 47.52246445457544, 229.9309956651041]}}, {"type": "Feature", "properties": {"id": "81", "info": "", "row": 9563.5, "col": 3007.333251953125}, "geometry": {"type": "Point", "coordinates": [-89.0648157741613, 47.48344776730025, 229.9309956651041]}}, {"type": "Feature", "properties": {"id": "82", "info": "", "row": 9563.5, "col": 4510.75}, "geometry": {"type": "Point", "coordinates": [-88.67049355795073, 47.44307523883301, 229.9309956651041]}}, {"type": "Feature", "properties": {"id": "83", "info": "", "row": 9563.5, "col": 6014.16650390625}, "geometry": {"type": "Point", "coordinates": [-88.27678403974781, 47.40135085084368, 229.9309956651041]}}, {"type": "Feature", "properties": {"id": "84", "info": "", "row": 9563.5, "col": 7517.5830078125}, "geometry": {"type": "Point", "coordinates": [-87.8837049237573, 47.358278620156725, 229.9309956651041]}}, {"type": "Feature", "properties": {"id": "85", "info": "", "row": 9563.5, "col": 9021.0}, "geometry": {"type": "Point", "coordinates": [-87.49127444178403, 47.31386275952505, 229.9309956651041]}}, {"type": "Feature", "properties": {"id": "86", "info": "", "row": 9563.5, "col": 10524.4169921875}, "geometry": {"type": "Point", "coordinates": [-87.09951032451309, 47.268107568208634, 229.9309956651041]}}, {"type": "Feature", "properties": {"id": "87", "info": "", "row": 9563.5, "col": 12027.833984375}, "geometry": {"type": "Point", "coordinates": [-86.70843005235145, 47.22101745671998, 229.9309956651041]}}, {"type": "Feature", "properties": {"id": "88", "info": "", "row": 9563.5, "col": 13531.2509765625}, "geometry": {"type": "Point", "coordinates": [-86.3180508505202, 47.172596944867436, 229.9309956651041]}}, {"type": "Feature", "properties": {"id": "89", "info": "", "row": 9563.5, "col": 15034.66796875}, "geometry": {"type": "Point", "coordinates": [-85.92838968434494, 47.12285065976317, 229.9309956651041]}}, {"type": "Feature", "properties": {"id": "90", "info": "", "row": 9563.5, "col": 16538.083984375}, "geometry": {"type": "Point", "coordinates": [-85.53946350722609, 47.071783367407555, 229.9309956651041]}}, {"type": "Feature", "properties": {"id": "91", "info": "", "row": 9563.5, "col": 18041.5}, "geometry": {"type": "Point", "coordinates": [-85.15128849825683, 47.019399871551144, 229.9309956651041]}}, {"type": "Feature", "properties": {"id": "92", "info": "", "row": 11157.3330078125, "col": 0.5}, "geometry": {"type": "Point", "coordinates": [-89.91441494721865, 47.27708672338609, 229.9309956651041]}}, {"type": "Feature", "properties": {"id": "93", "info": "", "row": 11157.3330078125, "col": 1503.9166259765625}, "geometry": {"type": "Point", "coordinates": [-89.52104730054543, 47.239374643903375, 229.9309956651041]}}, {"type": "Feature", "properties": {"id": "94", "info": "", "row": 11157.3330078125, "col": 3007.333251953125}, "geometry": {"type": "Point", "coordinates": [-89.12824667233033, 47.200316275381454, 229.9309956651041]}}, {"type": "Feature", "properties": {"id": "95", "info": "", "row": 11157.3330078125, "col": 4510.75}, "geometry": {"type": "Point", "coordinates": [-88.73603152078223, 47.159915422263204, 229.9309956651041]}}, {"type": "Feature", "properties": {"id": "96", "info": "", "row": 11157.3330078125, "col": 6014.16650390625}, "geometry": {"type": "Point", "coordinates": [-88.34442008065452, 47.118176008127335, 229.9309956651041]}}, {"type": "Feature", "properties": {"id": "97", "info": "", "row": 11157.3330078125, "col": 7517.5830078125}, "geometry": {"type": "Point", "coordinates": [-87.95342959667182, 47.07510198871667, 229.9309956651041]}}, {"type": "Feature", "properties": {"id": "98", "info": "", "row": 11157.3330078125, "col": 9021.0}, "geometry": {"type": "Point", "coordinates": [-87.56307784421283, 47.03069751280094, 229.9309956651041]}}, {"type": "Feature", "properties": {"id": "99", "info": "", "row": 11157.3330078125, "col": 10524.4169921875}, "geometry": {"type": "Point", "coordinates": [-87.17338210628769, 46.9849668127686, 229.9309956651041]}}, {"type": "Feature", "properties": {"id": "100", "info": "", "row": 11157.3330078125, "col": 12027.833984375}, "geometry": {"type": "Point", "coordinates": [-86.78435942343266, 46.93791422947208, 229.9309956651041]}}, {"type": "Feature", "properties": {"id": "101", "info": "", "row": 11157.3330078125, "col": 13531.2509765625}, "geometry": {"type": "Point", "coordinates": [-86.39602658877897, 46.889544210308806, 229.9309956651041]}}, {"type": "Feature", "properties": {"id": "102", "info": "", "row": 11157.3330078125, "col": 15034.66796875}, "geometry": {"type": "Point", "coordinates": [-86.00840014351509, 46.8398613072893, 229.9309956651041]}}, {"type": "Feature", "properties": {"id": "103", "info": "", "row": 11157.3330078125, "col": 16538.083984375}, "geometry": {"type": "Point", "coordinates": [-85.62149662408399, 46.78887020868021, 229.9309956651041]}}, {"type": "Feature", "properties": {"id": "104", "info": "", "row": 11157.3330078125, "col": 18041.5}, "geometry": {"type": "Point", "coordinates": [-85.23533180336632, 46.73657563800635, 229.9309956651041]}}, {"type": "Feature", "properties": {"id": "105", "info": "", "row": 12751.166015625, "col": 0.5}, "geometry": {"type": "Point", "coordinates": [-89.97338607242057, 46.994029143898544, 229.9309956651041]}}, {"type": "Feature", "properties": {"id": "106", "info": "", "row": 12751.166015625, "col": 1503.9166259765625}, "geometry": {"type": "Point", "coordinates": [-89.582110333078, 46.95626079235165, 229.9309956651041]}}, {"type": "Feature", "properties": {"id": "107", "info": "", "row": 12751.166015625, "col": 3007.333251953125}, "geometry": {"type": "Point", "coordinates": [-89.1913937361834, 46.91715942356583, 229.9309956651041]}}, {"type": "Feature", "properties": {"id": "108", "info": "", "row": 12751.166015625, "col": 4510.75}, "geometry": {"type": "Point", "coordinates": [-88.80125427546865, 46.87672878817727, 229.9309956651041]}}, {"type": "Feature", "properties": {"id": "109", "info": "", "row": 12751.166015625, "col": 6014.16650390625}, "geometry": {"type": "Point", "coordinates": [-88.41170972789966, 46.83497275298305, 229.9309956651041]}}, {"type": "Feature", "properties": {"id": "110", "info": "", "row": 12751.166015625, "col": 7517.5830078125}, "geometry": {"type": "Point", "coordinates": [-88.02277689104079, 46.79189521399975, 229.9309956651041]}}, {"type": "Feature", "properties": {"id": "111", "info": "", "row": 12751.166015625, "col": 9021.0}, "geometry": {"type": "Point", "coordinates": [-87.63447309611503, 46.747500257468936, 229.9309956651041]}}, {"type": "Feature", "properties": {"id": "112", "info": "", "row": 12751.166015625, "col": 10524.4169921875}, "geometry": {"type": "Point", "coordinates": [-87.24681519056348, 46.70179205045544, 229.9309956651041]}}, {"type": "Feature", "properties": {"id": "113", "info": "", "row": 12751.166015625, "col": 12027.833984375}, "geometry": {"type": "Point", "coordinates": [-86.85981978662043, 46.65477486574659, 229.9309956651041]}}, {"type": "Feature", "properties": {"id": "114", "info": "", "row": 12751.166015625, "col": 13531.2509765625}, "geometry": {"type": "Point", "coordinates": [-86.47350325674142, 46.606453080012706, 229.9309956651041]}}, {"type": "Feature", "properties": {"id": "115", "info": "", "row": 12751.166015625, "col": 15034.66796875}, "geometry": {"type": "Point", "coordinates": [-86.08788172928614, 46.55683117194342, 229.9309956651041]}}, {"type": "Feature", "properties": {"id": "116", "info": "", "row": 12751.166015625, "col": 16538.083984375}, "geometry": {"type": "Point", "coordinates": [-85.7029713343012, 46.505913753863865, 229.9309956651041]}}, {"type": "Feature", "properties": {"id": "117", "info": "", "row": 12751.166015625, "col": 18041.5}, "geometry": {"type": "Point", "coordinates": [-85.31878744919753, 46.45370547099807, 229.9309956651041]}}, {"type": "Feature", "properties": {"id": "118", "info": "", "row": 14344.9990234375, "col": 0.5}, "geometry": {"type": "Point", "coordinates": [-90.03214187494162, 46.71094878028964, 229.9309956651041]}}, {"type": "Feature", "properties": {"id": "119", "info": "", "row": 14344.9990234375, "col": 1503.9166259765625}, "geometry": {"type": "Point", "coordinates": [-89.64292692568341, 46.67312300221596, 229.9309956651041]}}, {"type": "Feature", "properties": {"id": "120", "info": "", "row": 14344.9990234375, "col": 3007.333251953125}, "geometry": {"type": "Point", "coordinates": [-89.25426340036918, 46.633977341689885, 229.9309956651041]}}, {"type": "Feature", "properties": {"id": "121", "info": "", "row": 14344.9990234375, "col": 4510.75}, "geometry": {"type": "Point", "coordinates": [-88.86616884088764, 46.5935154967144, 229.9309956651041]}}, {"type": "Feature", "properties": {"id": "122", "info": "", "row": 14344.9990234375, "col": 6014.16650390625}, "geometry": {"type": "Point", "coordinates": [-88.47866057869717, 46.55174127854886, 229.9309956651041]}}, {"type": "Feature", "properties": {"id": "123", "info": "", "row": 14344.9990234375, "col": 7517.5830078125}, "geometry": {"type": "Point", "coordinates": [-88.091754976321, 46.508658524819346, 229.9309956651041]}}, {"type": "Feature", "properties": {"id": "124", "info": "", "row": 14344.9990234375, "col": 9021.0}, "geometry": {"type": "Point", "coordinates": [-87.70546893269315, 46.464271260650136, 229.9309956651041]}}, {"type": "Feature", "properties": {"id": "125", "info": "", "row": 14344.9990234375, "col": 10524.4169921875}, "geometry": {"type": "Point", "coordinates": [-87.31981887123385, 46.41858358926404, 229.9309956651041]}}, {"type": "Feature", "properties": {"id": "126", "info": "", "row": 14344.9990234375, "col": 12027.833984375}, "geometry": {"type": "Point", "coordinates": [-86.93482098726949, 46.37159971695216, 229.9309956651041]}}, {"type": "Feature", "properties": {"id": "127", "info": "", "row": 14344.9990234375, "col": 13531.2509765625}, "geometry": {"type": "Point", "coordinates": [-86.55049124364812, 46.32332395129328, 229.9309956651041]}}, {"type": "Feature", "properties": {"id": "128", "info": "", "row": 14344.9990234375, "col": 15034.66796875}, "geometry": {"type": "Point", "coordinates": [-86.16684536660847, 46.27376069935127, 229.9309956651041]}}, {"type": "Feature", "properties": {"id": "129", "info": "", "row": 14344.9990234375, "col": 16538.083984375}, "geometry": {"type": "Point", "coordinates": [-85.7838990904372, 46.22291449929959, 229.9309956651041]}}, {"type": "Feature", "properties": {"id": "130", "info": "", "row": 14344.9990234375, "col": 18041.5}, "geometry": {"type": "Point", "coordinates": [-85.40166740713923, 46.17078991988218, 229.9309956651041]}}, {"type": "Feature", "properties": {"id": "131", "info": "", "row": 15938.83203125, "col": 0.5}, "geometry": {"type": "Point", "coordinates": [-90.09068747999387, 46.42784571221911, 229.9309956651041]}}, {"type": "Feature", "properties": {"id": "132", "info": "", "row": 15938.83203125, "col": 1503.9166259765625}, "geometry": {"type": "Point", "coordinates": [-89.70350278259144, 46.38996137715728, 229.9309956651041]}}, {"type": "Feature", "properties": {"id": "133", "info": "", "row": 15938.83203125, "col": 3007.333251953125}, "geometry": {"type": "Point", "coordinates": [-89.31686194340853, 46.350770160131056, 229.9309956651041]}}, {"type": "Feature", "properties": {"id": "134", "info": "", "row": 15938.83203125, "col": 4510.75}, "geometry": {"type": "Point", "coordinates": [-88.9307820646948, 46.31027570764781, 229.9309956651041]}}, {"type": "Feature", "properties": {"id": "135", "info": "", "row": 15938.83203125, "col": 6014.16650390625}, "geometry": {"type": "Point", "coordinates": [-88.54528004430718, 46.268481776638666, 229.9309956651041]}}, {"type": "Feature", "properties": {"id": "136", "info": "", "row": 15938.83203125, "col": 7517.5830078125}, "geometry": {"type": "Point", "coordinates": [-88.16037182142642, 46.22539214763218, 229.9309956651041]}}, {"type": "Feature", "properties": {"id": "137", "info": "", "row": 15938.83203125, "col": 9021.0}, "geometry": {"type": "Point", "coordinates": [-87.77607387421193, 46.18101078600726, 229.9309956651041]}}, {"type": "Feature", "properties": {"id": "138", "info": "", "row": 15938.83203125, "col": 10524.4169921875}, "geometry": {"type": "Point", "coordinates": [-87.39240221326627, 46.135341732584564, 229.9309956651041]}}, {"type": "Feature", "properties": {"id": "139", "info": "", "row": 15938.83203125, "col": 12027.833984375}, "geometry": {"type": "Point", "coordinates": [-87.00937262800574, 46.08838912867669, 229.9309956651041]}}, {"type": "Feature", "properties": {"id": "140", "info": "", "row": 15938.83203125, "col": 13531.2509765625}, "geometry": {"type": "Point", "coordinates": [-86.62700068240585, 46.040157214358686, 229.9309956651041]}}, {"type": "Feature", "properties": {"id": "141", "info": "", "row": 15938.83203125, "col": 15034.66796875}, "geometry": {"type": "Point", "coordinates": [-86.2453017110104, 45.99065032671934, 229.9309956651041]}}, {"type": "Feature", "properties": {"id": "142", "info": "", "row": 15938.83203125, "col": 16538.083984375}, "geometry": {"type": "Point", "coordinates": [-85.86429106258637, 45.93987293150769, 229.9309956651041]}}, {"type": "Feature", "properties": {"id": "143", "info": "", "row": 15938.83203125, "col": 18041.5}, "geometry": {"type": "Point", "coordinates": [-85.48398335359182, 45.88782952276703, 229.9309956651041]}}, {"type": "Feature", "properties": {"id": "144", "info": "", "row": 17532.666015625, "col": 0.5}, "geometry": {"type": "Point", "coordinates": [-90.14902792826584, 46.144719847340845, 229.9309956651041]}}, {"type": "Feature", "properties": {"id": "145", "info": "", "row": 17532.666015625, "col": 1503.9166259765625}, "geometry": {"type": "Point", "coordinates": [-89.76384350981257, 46.10677584809723, 229.9309956651041]}}, {"type": "Feature", "properties": {"id": "146", "info": "", "row": 17532.666015625, "col": 3007.333251953125}, "geometry": {"type": "Point", "coordinates": [-89.37919553204247, 46.06753783573127, 229.9309956651041]}}, {"type": "Feature", "properties": {"id": "147", "info": "", "row": 17532.666015625, "col": 4510.75}, "geometry": {"type": "Point", "coordinates": [-88.99510066936692, 46.02700940635795, 229.9309956651041]}}, {"type": "Feature", "properties": {"id": "148", "info": "", "row": 17532.666015625, "col": 6014.16650390625}, "geometry": {"type": "Point", "coordinates": [-88.61157539759475, 45.9851942637574, 229.9309956651041]}}, {"type": "Feature", "properties": {"id": "149", "info": "", "row": 17532.666015625, "col": 7517.5830078125}, "geometry": {"type": "Point", "coordinates": [-88.22863524390556, 45.94209613261766, 229.9309956651041]}}, {"type": "Feature", "properties": {"id": "150", "info": "", "row": 17532.666015625, "col": 9021.0}, "geometry": {"type": "Point", "coordinates": [-87.8462962767996, 45.89771891989987, 229.9309956651041]}}, {"type": "Feature", "properties": {"id": "151", "info": "", "row": 17532.666015625, "col": 10524.4169921875}, "geometry": {"type": "Point", "coordinates": [-87.46457410492093, 45.85206660542065, 229.9309956651041]}}, {"type": "Feature", "properties": {"id": "152", "info": "", "row": 17532.666015625, "col": 12027.833984375}, "geometry": {"type": "Point", "coordinates": [-87.08348412245924, 45.805143266990356, 229.9309956651041]}}, {"type": "Feature", "properties": {"id": "153", "info": "", "row": 17532.666015625, "col": 13531.2509765625}, "geometry": {"type": "Point", "coordinates": [-86.7030415049006, 45.756953078718716, 229.9309956651041]}}, {"type": "Feature", "properties": {"id": "154", "info": "", "row": 17532.666015625, "col": 15034.66796875}, "geometry": {"type": "Point", "coordinates": [-86.32326120517968, 45.70750030931821, 229.9309956651041]}}, {"type": "Feature", "properties": {"id": "155", "info": "", "row": 17532.666015625, "col": 16538.083984375}, "geometry": {"type": "Point", "coordinates": [-85.94415819650965, 45.65678935379403, 229.9309956651041]}}, {"type": "Feature", "properties": {"id": "156", "info": "", "row": 17532.666015625, "col": 18041.5}, "geometry": {"type": "Point", "coordinates": [-85.56574672931384, 45.60482463320837, 229.9309956651041]}}, {"type": "Feature", "properties": {"id": "157", "info": "", "row": 19126.5, "col": 0.5}, "geometry": {"type": "Point", "coordinates": [-90.20716719088948, 45.86157135154452, 229.9309956651041]}}, {"type": "Feature", "properties": {"id": "158", "info": "", "row": 19126.5, "col": 1503.9166259765625}, "geometry": {"type": "Point", "coordinates": [-89.8239536605245, 45.82356660411861, 229.9309956651041]}}, {"type": "Feature", "properties": {"id": "159", "info": "", "row": 19126.5, "col": 3007.333251953125}, "geometry": {"type": "Point", "coordinates": [-89.44126930059376, 45.78428058393543, 229.9309956651041]}}, {"type": "Feature", "properties": {"id": "160", "info": "", "row": 19126.5, "col": 4510.75}, "geometry": {"type": "Point", "coordinates": [-89.059130369533, 45.74371683787392, 229.9309956651041]}}, {"type": "Feature", "properties": {"id": "161", "info": "", "row": 19126.5, "col": 6014.16650390625}, "geometry": {"type": "Point", "coordinates": [-88.67755293323314, 45.70187901785341, 229.9309956651041]}}, {"type": "Feature", "properties": {"id": "162", "info": "", "row": 19126.5, "col": 7517.5830078125}, "geometry": {"type": "Point", "coordinates": [-88.2965521185096, 45.658770794069085, 229.9309956651041]}}, {"type": "Feature", "properties": {"id": "163", "info": "", "row": 19126.5, "col": 9021.0}, "geometry": {"type": "Point", "coordinates": [-87.9161435961237, 45.61439601654877, 229.9309956651041]}}, {"type": "Feature", "properties": {"id": "164", "info": "", "row": 19126.5, "col": 10524.4169921875}, "geometry": {"type": "Point", "coordinates": [-87.53634258487406, 45.56875860572775, 229.9309956651041]}}, {"type": "Feature", "properties": {"id": "165", "info": "", "row": 19126.5, "col": 12027.833984375}, "geometry": {"type": "Point", "coordinates": [-87.15716409570048, 45.521862577639226, 229.9309956651041]}}, {"type": "Feature", "properties": {"id": "166", "info": "", "row": 19126.5, "col": 13531.2509765625}, "geometry": {"type": "Point", "coordinates": [-86.77862292812794, 45.47371204234437, 229.9309956651041]}}, {"type": "Feature", "properties": {"id": "167", "info": "", "row": 19126.5, "col": 15034.66796875}, "geometry": {"type": "Point", "coordinates": [-86.40073366687713, 45.42431120234256, 229.9309956651041]}}, {"type": "Feature", "properties": {"id": "168", "info": "", "row": 19126.5, "col": 16538.083984375}, "geometry": {"type": "Point", "coordinates": [-86.02351092349664, 45.37366438427191, 229.9309956651041]}}, {"type": "Feature", "properties": {"id": "169", "info": "", "row": 19126.5, "col": 18041.5}, "geometry": {"type": "Point", "coordinates": [-85.64696859864004, 45.321775939081306, 229.9309956651041]}}]}
array(0)
- pole(pole)<U2'HH' 'HV'
array(['HH', 'HV'], dtype='<U2')
- band_data(pole, band, y, x)float320.0 0.0 0.0 0.0 ... 0.0 0.0 0.0 0.0
- AREA_OR_POINT :
- Area
array([[[[0., 0., 0., ..., 0., 0., 0.], [0., 0., 0., ..., 0., 0., 0.], [0., 0., 0., ..., 0., 0., 0.], ..., [0., 0., 0., ..., 0., 0., 0.], [0., 0., 0., ..., 0., 0., 0.], [0., 0., 0., ..., 0., 0., 0.]]], [[[0., 0., 0., ..., 0., 0., 0.], [0., 0., 0., ..., 0., 0., 0.], [0., 0., 0., ..., 0., 0., 0.], ..., [0., 0., 0., ..., 0., 0., 0.], [0., 0., 0., ..., 0., 0., 0.], [0., 0., 0., ..., 0., 0., 0.]]]], dtype=float32)
<xarray.DatasetView> Size: 3GB Dimensions: (pole: 2, band: 1, y: 19127, x: 18042) Coordinates: * band (band) int64 8B 1 spatial_ref int64 8B 0 * pole (pole) <U2 16B 'HH' 'HV' Dimensions without coordinates: y, x Data variables: band_data (pole, band, y, x) float32 3GB 0.0 0.0 0.0 0.0 ... 0.0 0.0 0.0imagery- copyright :
- RCM Data and Products (c) CSA, 2020 - All Rights Reserved.
- productId :
- 1050605_1
- documentIdentifier :
- RCM-SP-53-0419, Issue 2/5
- securityClassification :
- Non classifié / Unclassified
Examples of alias to datasets (from the datatree above)
[5]:
#geolocation grid (low resolution)
meta.geoloc
[5]:
<xarray.Dataset> Size: 4kB
Dimensions: (line: 13, pixel: 13)
Coordinates:
* line (line) float64 104B 0.0 1.594e+03 ... 1.753e+04 1.913e+04
* pixel (pixel) float64 104B 0.0 1.503e+03 ... 1.654e+04 1.804e+04
Data variables:
latitude (line, pixel) float64 1kB 48.72 48.77 48.82 ... 45.78 45.82 45.86
longitude (line, pixel) float64 1kB -84.63 -85.03 -85.44 ... -89.82 -90.21
height (line, pixel) float64 1kB 229.9 229.9 229.9 ... 229.9 229.9 229.9
Attributes:
footprint: POLYGON ((-84.63397773377159 48.71534850877886, -89.495130111...- line: 13
- pixel: 13
- line(line)float640.0 1.594e+03 ... 1.913e+04
array([ 0. , 1593.8334, 3187.6667, 4781.5 , 6375.3335, 7969.167 , 9563. , 11156.833 , 12750.666 , 14344.499 , 15938.332 , 17532.166 , 19126. ]) - pixel(pixel)float640.0 1.503e+03 ... 1.804e+04
array([ 0. , 1503.4166, 3006.8333, 4510.25 , 6013.6665, 7517.083 , 9020.5 , 10523.917 , 12027.334 , 13530.751 , 15034.168 , 16537.584 , 18041. ])
- latitude(line, pixel)float6448.72 48.77 48.82 ... 45.82 45.86
- units :
- deg
array([[48.71534851, 48.76832408, 48.81990431, 48.87008388, 48.9188575 , 48.96622008, 49.0121666 , 49.05669221, 49.09979216, 49.14146184, 49.18169682, 49.22049275, 49.25784541], [48.43281212, 48.48568175, 48.53716957, 48.58727035, 48.6359789 , 48.68329019, 48.72919932, 48.77370149, 48.81679205, 48.85846644, 48.89872032, 48.9375494 , 48.97494952], [48.15022622, 48.20299289, 48.25439115, 48.30441584, 48.35306187, 48.4003243 , 48.44619829, 48.49067914, 48.53376227, 48.57544319, 48.61571763, 48.65458135, 48.69203027], [47.86759144, 47.92025809, 47.97156956, 48.02152082, 48.07010684, 48.11732276, 48.16316384, 48.20762544, 48.25070306, 48.29239228, 48.3326889 , 48.37158874, 48.40908778], [47.58490836, 47.63747783, 47.68870526, 47.73858567, 47.78711413, 47.83428587, 47.88009621, 47.92454059, 47.96761458, 48.00931384, 48.04963421, 48.08857161, 48.12612205], [47.30217761, 47.35465272, 47.40579877, 47.45561087, 47.50408419, 47.551214 , 47.59699572, 47.64142487, 47.68449708, 47.72620807, 47.76655376, 47.80553012, 47.84313321], [47.01939987, 47.07178337, 47.12285066, 47.17259694, 47.22101746, 47.26810757, 47.31386276, 47.35827862, 47.40135085, 47.44307524, 47.48344777, 47.52246445, 47.56012144], [46.73657564, 46.78887021, 46.83986131, 46.88954421, 46.93791423, 46.98496681, 47.03069751, 47.07510199, 47.11817601, 47.15991542, 47.20031628, 47.23937464, 47.27708672], [46.45370547, 46.50591375, 46.55683117, 46.60645308, 46.65477487, 46.70179205, 46.74750026, 46.79189521, 46.83497275, 46.87672879, 46.91715942, 46.95626079, 46.99402914], [46.17078992, 46.2229145 , 46.2737607 , 46.32332395, 46.37159972, 46.41858359, 46.46427126, 46.50865852, 46.55174128, 46.5935155 , 46.63397734, 46.673123 , 46.71094878], [45.88782952, 45.93987293, 45.99065033, 46.04015721, 46.08838913, 46.13534173, 46.18101079, 46.22539215, 46.26848178, 46.31027571, 46.35077016, 46.38996138, 46.42784571], [45.60482463, 45.65678935, 45.70750031, 45.75695308, 45.80514327, 45.85206661, 45.89771892, 45.94209613, 45.98519426, 46.02700941, 46.06753784, 46.10677585, 46.14471985], [45.32177594, 45.37366438, 45.4243112 , 45.47371204, 45.52186258, 45.56875861, 45.61439602, 45.65877079, 45.70187902, 45.74371684, 45.78428058, 45.8235666 , 45.86157135]]) - longitude(line, pixel)float64-84.63 -85.03 ... -89.82 -90.21
- units :
- deg
array([[-84.63397773, -85.03485893, -85.43657252, -85.83909967, -86.24242065, -86.64651572, -87.05136479, -87.45694747, -87.86324307, -88.27023034, -88.67788853, -89.08619582, -89.49513011], [-84.72181616, -85.12049999, -85.52000188, -85.92030343, -86.32138545, -86.72322865, -87.12581347, -87.52912005, -87.93312821, -88.33781725, -88.74316696, -89.14915607, -89.55576306], [-84.80898835, -85.20550748, -85.60283064, -86.00093993, -86.3998166 , -86.79944187, -87.19979668, -87.60086164, -88.00261712, -88.40504292, -88.80811937, -89.21182575, -89.61614106], [-84.89550825, -85.28989472, -85.68507155, -86.08102127, -86.47772559, -86.87516623, -87.27332458, -87.67218176, -88.07171864, -88.47191552, -88.87275325, -89.27421163, -89.67627021], [-84.98138947, -85.37367476, -85.76673703, -86.16055926, -86.55512363, -86.95041229, -87.34640711, -87.74308971, -88.14044141, -88.53844303, -88.93707591, -89.33632037, -89.73615646], ... [-85.31878745, -85.70297133, -86.08788173, -86.47350326, -86.85981979, -87.24681519, -87.6344731 , -88.02277689, -88.41170973, -88.80125428, -89.19139374, -89.58211033, -89.97338607], [-85.40166741, -85.78389909, -86.16684537, -86.55049124, -86.93482099, -87.31981887, -87.70546893, -88.09175498, -88.47866058, -88.86616884, -89.2542634 , -89.64292693, -90.03214187], [-85.48398335, -85.86429106, -86.24530171, -86.62700068, -87.00937263, -87.39240221, -87.77607387, -88.16037182, -88.54528004, -88.93078206, -89.31686194, -89.70350278, -90.09068748], [-85.56574673, -85.9441582 , -86.32326121, -86.7030415 , -87.08348412, -87.4645741 , -87.84629628, -88.22863524, -88.6115754 , -88.99510067, -89.37919553, -89.76384351, -90.14902793], [-85.6469686 , -86.02351092, -86.40073367, -86.77862293, -87.1571641 , -87.53634258, -87.9161436 , -88.29655212, -88.67755293, -89.05913037, -89.4412693 , -89.82395366, -90.20716719]]) - height(line, pixel)float64229.9 229.9 229.9 ... 229.9 229.9
- units :
- m
array([[229.93099567, 229.93099567, 229.93099567, 229.93099567, 229.93099567, 229.93099567, 229.93099567, 229.93099567, 229.93099567, 229.93099567, 229.93099567, 229.93099567, 229.93099567], [229.93099567, 229.93099567, 229.93099567, 229.93099567, 229.93099567, 229.93099567, 229.93099567, 229.93099567, 229.93099567, 229.93099567, 229.93099567, 229.93099567, 229.93099567], [229.93099567, 229.93099567, 229.93099567, 229.93099567, 229.93099567, 229.93099567, 229.93099567, 229.93099567, 229.93099567, 229.93099567, 229.93099567, 229.93099567, 229.93099567], [229.93099567, 229.93099567, 229.93099567, 229.93099567, 229.93099567, 229.93099567, 229.93099567, 229.93099567, 229.93099567, 229.93099567, 229.93099567, 229.93099567, 229.93099567], [229.93099567, 229.93099567, 229.93099567, 229.93099567, 229.93099567, 229.93099567, 229.93099567, 229.93099567, 229.93099567, 229.93099567, 229.93099567, 229.93099567, 229.93099567], ... [229.93099567, 229.93099567, 229.93099567, 229.93099567, 229.93099567, 229.93099567, 229.93099567, 229.93099567, 229.93099567, 229.93099567, 229.93099567, 229.93099567, 229.93099567], [229.93099567, 229.93099567, 229.93099567, 229.93099567, 229.93099567, 229.93099567, 229.93099567, 229.93099567, 229.93099567, 229.93099567, 229.93099567, 229.93099567, 229.93099567], [229.93099567, 229.93099567, 229.93099567, 229.93099567, 229.93099567, 229.93099567, 229.93099567, 229.93099567, 229.93099567, 229.93099567, 229.93099567, 229.93099567, 229.93099567], [229.93099567, 229.93099567, 229.93099567, 229.93099567, 229.93099567, 229.93099567, 229.93099567, 229.93099567, 229.93099567, 229.93099567, 229.93099567, 229.93099567, 229.93099567], [229.93099567, 229.93099567, 229.93099567, 229.93099567, 229.93099567, 229.93099567, 229.93099567, 229.93099567, 229.93099567, 229.93099567, 229.93099567, 229.93099567, 229.93099567]])
- linePandasIndex
PandasIndex(Index([ 0.0, 1593.8334, 3187.6667, 4781.5, 6375.3335, 7969.167, 9563.0, 11156.833, 12750.666, 14344.499, 15938.332, 17532.166, 19126.0], dtype='float64', name='line')) - pixelPandasIndex
PandasIndex(Index([ 0.0, 1503.4166, 3006.8333, 4510.25, 6013.6665, 7517.083, 9020.5, 10523.917, 12027.334, 13530.751, 15034.168, 16537.584, 18041.0], dtype='float64', name='pixel'))
- footprint :
- POLYGON ((-84.63397773377159 48.71534850877886, -89.49513011173734 49.25784540666172, -90.20716719088948 45.86157135154452, -85.64696859864004 45.32177593908131, -84.63397773377159 48.71534850877886))
In the metadata class : noise lut, calibration lut and incidence are processed because samples are expressed thanks to a firstPixelValue, a step and a nbOfValues. It is made internally to the reader’s datatree thanks to the method assign_index See Documentation : RCM Image Product Format Definition (7.5.1)
[6]:
#Calibration look up tables in range
meta.lut
[6]:
<xarray.DatasetView> Size: 44kB
Dimensions: (sarCalibrationType: 3, pole: 2, pixel: 786)
Coordinates:
* sarCalibrationType (sarCalibrationType) <U12 144B 'Beta Nought' ... 'Sig...
* pole (pole) <U2 16B 'HH' 'HV'
* pixel (pixel) int64 6kB -14 9 32 55 ... 17995 18018 18041
Data variables:
lookup_tables (pixel, sarCalibrationType, pole) float64 38kB 2.731e...- sarCalibrationType: 3
- pole: 2
- pixel: 786
- sarCalibrationType(sarCalibrationType)<U12'Beta Nought' ... 'Sigma Nought'
array(['Beta Nought', 'Gamma', 'Sigma Nought'], dtype='<U12')
- pole(pole)<U2'HH' 'HV'
array(['HH', 'HV'], dtype='<U2')
- pixel(pixel)int64-14 9 32 55 ... 17995 18018 18041
array([ -14, 9, 32, ..., 17995, 18018, 18041])
- lookup_tables(pixel, sarCalibrationType, pole)float642.731e+09 2.731e+09 ... 5.693e+08
- pixelFirstLutValue :
- 18041
- stepSize :
- -23
- numberOfValues :
- 786
- offset :
- 0.0
array([[[2.73082741e+09, 2.73082741e+09], [2.21500277e+09, 2.21500277e+09], [3.51619892e+09, 3.51619892e+09]], [[2.72612253e+09, 2.72612253e+09], [2.21298095e+09, 2.21298095e+09], [3.51127167e+09, 3.51127167e+09]], [[2.72142141e+09, 2.72142141e+09], [2.21095918e+09, 2.21095918e+09], [3.50634781e+09, 3.50634781e+09]], ..., [[2.59798046e+08, 2.59798046e+08], [5.10917558e+08, 5.10917558e+08], [5.73176915e+08, 5.73176915e+08]], [[2.58573945e+08, 2.58573945e+08], [5.09382251e+08, 5.09382251e+08], [5.71253676e+08, 5.71253676e+08]], [[2.57354887e+08, 2.57354887e+08], [5.07851527e+08, 5.07851527e+08], [5.69337080e+08, 5.69337080e+08]]])
- sarCalibrationTypePandasIndex
PandasIndex(Index(['Beta Nought', 'Gamma', 'Sigma Nought'], dtype='object', name='sarCalibrationType'))
- polePandasIndex
PandasIndex(Index(['HH', 'HV'], dtype='object', name='pole'))
- pixelPandasIndex
PandasIndex(Index([ -14, 9, 32, 55, 78, 101, 124, 147, 170, 193, ... 17834, 17857, 17880, 17903, 17926, 17949, 17972, 17995, 18018, 18041], dtype='int64', name='pixel', length=786))
[7]:
#noise look up tables in range
meta.noise_lut
[7]:
<xarray.DatasetView> Size: 44kB
Dimensions: (pole: 2, sarCalibrationType: 3, pixel: 786)
Coordinates:
* sarCalibrationType (sarCalibrationType) <U12 144B 'Beta Nought' ... 'S...
pixelFirstNoiseValue int64 8B 18041
stepSize int64 8B -23
* pole (pole) <U2 16B 'HH' 'HV'
* pixel (pixel) int64 6kB -14 9 32 55 ... 17995 18018 18041
Data variables:
noiseLevelValues (pole, sarCalibrationType, pixel) float64 38kB -33....
Attributes:
numberOfValues: 786- pole: 2
- sarCalibrationType: 3
- pixel: 786
- sarCalibrationType(sarCalibrationType)<U12'Beta Nought' ... 'Sigma Nought'
array(['Beta Nought', 'Gamma', 'Sigma Nought'], dtype='<U12')
- pixelFirstNoiseValue()int6418041
array(18041)
- stepSize()int64-23
array(-23)
- pole(pole)<U2'HH' 'HV'
array(['HH', 'HV'], dtype='<U2')
- pixel(pixel)int64-14 9 32 55 ... 17995 18018 18041
array([ -14, 9, 32, ..., 17995, 18018, 18041])
- noiseLevelValues(pole, sarCalibrationType, pixel)float64-33.18 -33.25 ... -33.86 -33.6
- units :
- dB
array([[[-33.18246722, -33.25351197, -33.32550201, ..., -30.89473432, -30.61496587, -30.3483882 ], [-32.27326558, -32.34783499, -32.42335129, ..., -33.8318838 , -33.55955633, -33.30043163], [-34.28025818, -34.35270257, -34.42609398, ..., -34.33126243, -34.05740833, -33.7967587 ]], [[-32.91420891, -32.9848524 , -33.05643046, ..., -30.69766432, -30.41789288, -30.15131232], [-32.00500727, -32.07917543, -32.15427974, ..., -33.6348138 , -33.36248334, -33.10335575], [-34.01199987, -34.084043 , -34.15702243, ..., -34.13419243, -33.86033534, -33.59968282]]])
- sarCalibrationTypePandasIndex
PandasIndex(Index(['Beta Nought', 'Gamma', 'Sigma Nought'], dtype='object', name='sarCalibrationType'))
- polePandasIndex
PandasIndex(Index(['HH', 'HV'], dtype='object', name='pole'))
- pixelPandasIndex
PandasIndex(Index([ -14, 9, 32, 55, 78, 101, 124, 147, 170, 193, ... 17834, 17857, 17880, 17903, 17926, 17949, 17972, 17995, 18018, 18041], dtype='int64', name='pixel', length=786))
- numberOfValues :
- 786
[8]:
#incidence angles
meta.incidence
[8]:
<xarray.DatasetView> Size: 13kB
Dimensions: (pixel: 786)
Coordinates:
* pixel (pixel) int64 6kB -14 9 32 55 78 ... 17949 17972 17995 18018 18041
Data variables:
angles (pixel) float64 6kB 26.87 26.91 26.95 26.99 ... 50.91 50.93 50.95
Attributes:
pixelFirstAnglesValue: 18041
stepSize: -23
numberOfValues: 786- pixel: 786
- pixel(pixel)int64-14 9 32 55 ... 17995 18018 18041
array([ -14, 9, 32, ..., 17995, 18018, 18041])
- angles(pixel)float6426.87 26.91 26.95 ... 50.93 50.95
- units :
- deg
array([26.87371332, 26.91337928, 26.95302158, 26.99264021, 27.03223515, 27.07180641, 27.11135395, 27.15087779, 27.1903779 , 27.22985429, 27.26930693, 27.30873583, 27.34814096, 27.38752233, 27.42687993, 27.46621373, 27.50552375, 27.54480996, 27.58407236, 27.62331095, 27.6625257 , 27.70171662, 27.7408837 , 27.78002692, 27.81914629, 27.85824179, 27.89731341, 27.93636115, 27.975385 , 28.01438495, 28.05336099, 28.09231312, 28.13124133, 28.17014562, 28.20902597, 28.24788238, 28.28671484, 28.32552334, 28.36430788, 28.40306846, 28.44180506, 28.48051768, 28.51920631, 28.55787095, 28.59651158, 28.63512821, 28.67372083, 28.71228943, 28.75083401, 28.78935455, 28.82785106, 28.86632353, 28.90477195, 28.94319632, 28.98159663, 29.01997288, 29.05832507, 29.09665318, 29.13495721, 29.17323716, 29.21149302, 29.24972478, 29.28793246, 29.32611602, 29.36427549, 29.40241084, 29.44052208, 29.4786092 , 29.51667219, 29.55471106, 29.5927258 , 29.6307164 , 29.66868286, 29.70662518, 29.74454335, 29.78243737, 29.82030724, 29.85815295, 29.8959745 , 29.93377188, 29.9715451 , 30.00929415, 30.04701903, 30.08471973, 30.12239625, 30.16004858, 30.19767674, 30.2352807 , 30.27286048, 30.31041606, 30.34794745, 30.38545464, 30.42293763, 30.46039642, 30.49783101, 30.53524139, 30.57262756, 30.60998953, 30.64732728, 30.68464082, ... 48.71689308, 48.74126538, 48.76561973, 48.78995613, 48.8142746 , 48.83857516, 48.86285781, 48.88712259, 48.91136949, 48.93559854, 48.95980975, 48.98400313, 49.00817871, 49.03233649, 49.05647649, 49.08059873, 49.10470321, 49.12878996, 49.152859 , 49.17691032, 49.20094396, 49.22495992, 49.24895823, 49.27293888, 49.29690191, 49.32084732, 49.34477513, 49.36868536, 49.39257802, 49.41645312, 49.44031068, 49.46415071, 49.48797323, 49.51177826, 49.53556581, 49.55933589, 49.58308852, 49.60682371, 49.63054148, 49.65424184, 49.67792482, 49.70159041, 49.72523864, 49.74886953, 49.77248308, 49.79607932, 49.81965826, 49.8432199 , 49.86676427, 49.89029139, 49.91380126, 49.9372939 , 49.96076933, 49.98422756, 50.00766861, 50.03109249, 50.05449921, 50.07788879, 50.10126125, 50.1246166 , 50.14795485, 50.17127603, 50.19458013, 50.21786719, 50.24113721, 50.26439021, 50.2876262 , 50.3108452 , 50.33404722, 50.35723228, 50.38040039, 50.40355157, 50.42668583, 50.44980318, 50.47290365, 50.49598725, 50.51905398, 50.54210387, 50.56513693, 50.58815317, 50.61115261, 50.63413527, 50.65710115, 50.68005028, 50.70298267, 50.72589833, 50.74879727, 50.77167952, 50.79454508, 50.81739398, 50.84022622, 50.86304182, 50.88584079, 50.90862316, 50.93138893, 50.9541414 ])
- pixelPandasIndex
PandasIndex(Index([ -14, 9, 32, 55, 78, 101, 124, 147, 170, 193, ... 17834, 17857, 17880, 17903, 17926, 17949, 17972, 17995, 18018, 18041], dtype='int64', name='pixel', length=786))
- pixelFirstAnglesValue :
- 18041
- stepSize :
- -23
- numberOfValues :
- 786
Open a dataset
[9]:
# Define the resolution to load the dataset at a lower resolution (if not specified or None, the dataset is loaded at high resolution)
resolution = '1000m'
# Instanciate a RadarSatDataset object
rcmds = xsar.RcmDataset(dataset_id=path, resolution=resolution)
Get the Dataset object
[10]:
rcmds
[10]:
<RcmDataset full coverage object>
Access the metadata object from the Dataset object
[11]:
rcmds.sar_meta
[11]:
<BlockingActorProxy: RcmMeta>
Access the dataset
In this dataset, we can find variables like latitude, longitude, look up tables (before and after denoising), incidence…
[12]:
rcmds.dataset
[12]:
<xarray.Dataset> Size: 23MB
Dimensions: (line: 382, pol: 2, sample: 360)
Coordinates:
* line (line) float64 3kB 24.5 74.5 124.5 ... 1.902e+04 1.907e+04
* pol (pol) <U2 16B 'HH' 'HV'
* sample (sample) float64 3kB 24.5 74.5 ... 1.792e+04 1.797e+04
Data variables: (12/21)
digital_number (pol, line, sample) uint16 550kB dask.array<chunksize=(1, 382, 360), meta=np.ndarray>
lines_flipped bool 1B False
samples_flipped bool 1B True
sampleSpacing float64 8B 1e+03
lineSpacing float64 8B 1e+03
sigma0_raw (pol, line, sample) float64 2MB dask.array<chunksize=(1, 382, 360), meta=np.ndarray>
... ...
ground_heading (line, sample) float32 550kB dask.array<chunksize=(382, 360), meta=np.ndarray>
latitude (line, sample) float64 1MB dask.array<chunksize=(382, 360), meta=np.ndarray>
longitude (line, sample) float64 1MB dask.array<chunksize=(382, 360), meta=np.ndarray>
altitude (line, sample) float64 1MB dask.array<chunksize=(382, 360), meta=np.ndarray>
incidence (line, sample) float32 550kB dask.array<chunksize=(382, 360), meta=np.ndarray>
elevation (line, sample) float64 1MB dask.array<chunksize=(382, 360), meta=np.ndarray>
Attributes: (12/18)
name: RCM_DS:/home1/scratch/agrouaze/xsardatasync/xsar...
short_name: RCM_DS:RCM1_OK1050603_PK1050605_1_SC50MB_2020021...
product: Z010
safe: RCM1_OK1050603_PK1050605_1_SC50MB_20200214_11590...
swath: SC50MB
multidataset: False
... ...
stop_date: 2020-02-14 12:00:02.000000
footprint: POLYGON ((-84.63397773377159 48.71534850877886, ...
coverage: 381km * 359km (line * sample )
pixel_line_m: 20.0
pixel_sample_m: 20.0
approx_transform: |-0.00,-0.00,-84.71|\n|-0.00, 0.00, 48.73|\n| 0....- line: 382
- pol: 2
- sample: 360
- line(line)float6424.5 74.5 ... 1.902e+04 1.907e+04
array([ 24.5, 74.5, 124.5, ..., 18974.5, 19024.5, 19074.5])
- pol(pol)<U2'HH' 'HV'
array(['HH', 'HV'], dtype='<U2')
- sample(sample)float6424.5 74.5 ... 1.792e+04 1.797e+04
array([ 24.5, 74.5, 124.5, ..., 17874.5, 17924.5, 17974.5])
- digital_number(pol, line, sample)uint16dask.array<chunksize=(1, 382, 360), meta=np.ndarray>
- comment :
- not denoised digital number, resampled at "1000m" with rasterio.enums.Resampling.rms
- history :
- digital_number: imagery/1050605_1_H*.tif
Array Chunk Bytes 537.19 kiB 268.59 kiB Shape (2, 382, 360) (1, 382, 360) Dask graph 2 chunks in 4 graph layers Data type uint16 numpy.ndarray - lines_flipped()boolFalse
- meaning :
- xsar convention : increasing time along line axis (whatever ascending or descending pass direction)
array(False)
- samples_flipped()boolTrue
- meaning :
- xsar convention : increasing incidence values along samples axis
array(True)
- sampleSpacing()float641e+03
- referential :
- ground
- units :
- m
array(1000.)
- lineSpacing()float641e+03
- units :
- m
array(1000.)
- sigma0_raw(pol, line, sample)float64dask.array<chunksize=(1, 382, 360), meta=np.ndarray>
- pixelFirstLutValue :
- 18041
- stepSize :
- -23
- numberOfValues :
- 786
- offset :
- 0.0
Array Chunk Bytes 2.10 MiB 1.05 MiB Shape (2, 382, 360) (1, 382, 360) Dask graph 2 chunks in 20 graph layers Data type float64 numpy.ndarray - nesz(pol, line, sample)float32dask.array<chunksize=(1, 382, 360), meta=np.ndarray>
Array Chunk Bytes 1.05 MiB 537.19 kiB Shape (2, 382, 360) (1, 382, 360) Dask graph 2 chunks in 11 graph layers Data type float32 numpy.ndarray - gamma0_raw(pol, line, sample)float64dask.array<chunksize=(1, 382, 360), meta=np.ndarray>
- pixelFirstLutValue :
- 18041
- stepSize :
- -23
- numberOfValues :
- 786
- offset :
- 0.0
Array Chunk Bytes 2.10 MiB 1.05 MiB Shape (2, 382, 360) (1, 382, 360) Dask graph 2 chunks in 20 graph layers Data type float64 numpy.ndarray - negz(pol, line, sample)float32dask.array<chunksize=(1, 382, 360), meta=np.ndarray>
Array Chunk Bytes 1.05 MiB 537.19 kiB Shape (2, 382, 360) (1, 382, 360) Dask graph 2 chunks in 11 graph layers Data type float32 numpy.ndarray - beta0_raw(pol, line, sample)float64dask.array<chunksize=(1, 382, 360), meta=np.ndarray>
- pixelFirstLutValue :
- 18041
- stepSize :
- -23
- numberOfValues :
- 786
- offset :
- 0.0
Array Chunk Bytes 2.10 MiB 1.05 MiB Shape (2, 382, 360) (1, 382, 360) Dask graph 2 chunks in 20 graph layers Data type float64 numpy.ndarray - nebz(pol, line, sample)float32dask.array<chunksize=(1, 382, 360), meta=np.ndarray>
Array Chunk Bytes 1.05 MiB 537.19 kiB Shape (2, 382, 360) (1, 382, 360) Dask graph 2 chunks in 11 graph layers Data type float32 numpy.ndarray - sigma0(pol, line, sample)float64dask.array<chunksize=(1, 382, 360), meta=np.ndarray>
- comment :
- not clipped, some values can be <0
Array Chunk Bytes 2.10 MiB 1.05 MiB Shape (2, 382, 360) (1, 382, 360) Dask graph 2 chunks in 31 graph layers Data type float64 numpy.ndarray - beta0(pol, line, sample)float64dask.array<chunksize=(1, 382, 360), meta=np.ndarray>
- comment :
- not clipped, some values can be <0
Array Chunk Bytes 2.10 MiB 1.05 MiB Shape (2, 382, 360) (1, 382, 360) Dask graph 2 chunks in 31 graph layers Data type float64 numpy.ndarray - gamma0(pol, line, sample)float64dask.array<chunksize=(1, 382, 360), meta=np.ndarray>
- comment :
- not clipped, some values can be <0
Array Chunk Bytes 2.10 MiB 1.05 MiB Shape (2, 382, 360) (1, 382, 360) Dask graph 2 chunks in 31 graph layers Data type float64 numpy.ndarray - land_mask(line, sample)int8dask.array<chunksize=(382, 360), meta=np.ndarray>
- history :
- land_mask: cartopy.feature.NaturalEarthFeature land
- meaning :
- 0: ocean , 1: land
Array Chunk Bytes 134.30 kiB 134.30 kiB Shape (382, 360) (382, 360) Dask graph 1 chunks in 3 graph layers Data type int8 numpy.ndarray - ground_heading(line, sample)float32dask.array<chunksize=(382, 360), meta=np.ndarray>
- comment :
- at ground level, computed from lon/lat in azimuth direction
- long_name :
- Platform heading (azimuth from North)
- units :
- Degrees
Array Chunk Bytes 537.19 kiB 537.19 kiB Shape (382, 360) (382, 360) Dask graph 1 chunks in 4 graph layers Data type float32 numpy.ndarray - latitude(line, sample)float64dask.array<chunksize=(382, 360), meta=np.ndarray>
Array Chunk Bytes 1.05 MiB 1.05 MiB Shape (382, 360) (382, 360) Dask graph 1 chunks in 4 graph layers Data type float64 numpy.ndarray - longitude(line, sample)float64dask.array<chunksize=(382, 360), meta=np.ndarray>
Array Chunk Bytes 1.05 MiB 1.05 MiB Shape (382, 360) (382, 360) Dask graph 1 chunks in 4 graph layers Data type float64 numpy.ndarray - altitude(line, sample)float64dask.array<chunksize=(382, 360), meta=np.ndarray>
Array Chunk Bytes 1.05 MiB 1.05 MiB Shape (382, 360) (382, 360) Dask graph 1 chunks in 4 graph layers Data type float64 numpy.ndarray - incidence(line, sample)float32dask.array<chunksize=(382, 360), meta=np.ndarray>
Array Chunk Bytes 537.19 kiB 537.19 kiB Shape (382, 360) (382, 360) Dask graph 1 chunks in 5 graph layers Data type float32 numpy.ndarray - elevation(line, sample)float64dask.array<chunksize=(382, 360), meta=np.ndarray>
Array Chunk Bytes 1.05 MiB 1.05 MiB Shape (382, 360) (382, 360) Dask graph 1 chunks in 12 graph layers Data type float64 numpy.ndarray
- linePandasIndex
PandasIndex(Index([ 24.5, 74.5, 124.5, 174.5, 224.5, 274.5, 324.5, 374.5, 424.5, 474.5, ... 18624.5, 18674.5, 18724.5, 18774.5, 18824.5, 18874.5, 18924.5, 18974.5, 19024.5, 19074.5], dtype='float64', name='line', length=382)) - polPandasIndex
PandasIndex(Index(['HH', 'HV'], dtype='object', name='pol'))
- samplePandasIndex
PandasIndex(Index([ 24.5, 74.5, 124.5, 174.5, 224.5, 274.5, 324.5, 374.5, 424.5, 474.5, ... 17524.5, 17574.5, 17624.5, 17674.5, 17724.5, 17774.5, 17824.5, 17874.5, 17924.5, 17974.5], dtype='float64', name='sample', length=360))
- name :
- RCM_DS:/home1/scratch/agrouaze/xsardatasync/xsardata/RCM1_OK1050603_PK1050605_1_SC50MB_20200214_115905_HH_HV_Z010:
- short_name :
- RCM_DS:RCM1_OK1050603_PK1050605_1_SC50MB_20200214_115905_HH_HV_Z010:
- product :
- Z010
- safe :
- RCM1_OK1050603_PK1050605_1_SC50MB_20200214_115905_HH_HV_Z010
- swath :
- SC50MB
- multidataset :
- False
- copyright :
- RCM Data and Products (c) CSA, 2020 - All Rights Reserved.
- productId :
- 1050605_1
- documentIdentifier :
- RCM-SP-53-0419, Issue 2/5
- securityClassification :
- Non classifié / Unclassified
- pols :
- HH HV
- start_date :
- 2020-02-14 11:59:03.000000
- stop_date :
- 2020-02-14 12:00:02.000000
- footprint :
- POLYGON ((-84.63397773377159 48.71534850877886, -89.49513011173734 49.25784540666172, -90.20716719088948 45.86157135154452, -85.64696859864004 45.32177593908131, -84.63397773377159 48.71534850877886))
- coverage :
- 381km * 359km (line * sample )
- pixel_line_m :
- 20.0
- pixel_sample_m :
- 20.0
- approx_transform :
- |-0.00,-0.00,-84.71| |-0.00, 0.00, 48.73| | 0.00, 0.00, 1.00|
Variables lines_flippedand samples_flipped are added to the dataset to know if these have been flipped (in order to follow xsar convention).
See RCM Image Product Format Definition (4.2.1) for more explication about the different cases when lines or samples are flipped
Alternatives solutions to open dataset and datatree
[13]:
# Open dataset
xsar.open_dataset(path, resolution=resolution)
[13]:
<xarray.Dataset> Size: 23MB
Dimensions: (line: 382, pol: 2, sample: 360)
Coordinates:
* line (line) float64 3kB 24.5 74.5 124.5 ... 1.902e+04 1.907e+04
* pol (pol) <U2 16B 'HH' 'HV'
* sample (sample) float64 3kB 24.5 74.5 ... 1.792e+04 1.797e+04
Data variables: (12/21)
digital_number (pol, line, sample) uint16 550kB dask.array<chunksize=(1, 382, 360), meta=np.ndarray>
lines_flipped bool 1B False
samples_flipped bool 1B True
sampleSpacing float64 8B 1e+03
lineSpacing float64 8B 1e+03
sigma0_raw (pol, line, sample) float64 2MB dask.array<chunksize=(1, 382, 360), meta=np.ndarray>
... ...
ground_heading (line, sample) float32 550kB dask.array<chunksize=(382, 360), meta=np.ndarray>
latitude (line, sample) float64 1MB dask.array<chunksize=(382, 360), meta=np.ndarray>
longitude (line, sample) float64 1MB dask.array<chunksize=(382, 360), meta=np.ndarray>
altitude (line, sample) float64 1MB dask.array<chunksize=(382, 360), meta=np.ndarray>
incidence (line, sample) float32 550kB dask.array<chunksize=(382, 360), meta=np.ndarray>
elevation (line, sample) float64 1MB dask.array<chunksize=(382, 360), meta=np.ndarray>
Attributes: (12/18)
name: RCM_DS:/home1/scratch/agrouaze/xsardatasync/xsar...
short_name: RCM_DS:RCM1_OK1050603_PK1050605_1_SC50MB_2020021...
product: Z010
safe: RCM1_OK1050603_PK1050605_1_SC50MB_20200214_11590...
swath: SC50MB
multidataset: False
... ...
stop_date: 2020-02-14 12:00:02.000000
footprint: POLYGON ((-84.63397773377159 48.71534850877886, ...
coverage: 381km * 359km (line * sample )
pixel_line_m: 20.0
pixel_sample_m: 20.0
approx_transform: |-0.00,-0.00,-84.71|\n|-0.00, 0.00, 48.73|\n| 0....- line: 382
- pol: 2
- sample: 360
- line(line)float6424.5 74.5 ... 1.902e+04 1.907e+04
array([ 24.5, 74.5, 124.5, ..., 18974.5, 19024.5, 19074.5])
- pol(pol)<U2'HH' 'HV'
array(['HH', 'HV'], dtype='<U2')
- sample(sample)float6424.5 74.5 ... 1.792e+04 1.797e+04
array([ 24.5, 74.5, 124.5, ..., 17874.5, 17924.5, 17974.5])
- digital_number(pol, line, sample)uint16dask.array<chunksize=(1, 382, 360), meta=np.ndarray>
- comment :
- not denoised digital number, resampled at "1000m" with rasterio.enums.Resampling.rms
- history :
- digital_number: imagery/1050605_1_H*.tif
Array Chunk Bytes 537.19 kiB 268.59 kiB Shape (2, 382, 360) (1, 382, 360) Dask graph 2 chunks in 4 graph layers Data type uint16 numpy.ndarray - lines_flipped()boolFalse
- meaning :
- xsar convention : increasing time along line axis (whatever ascending or descending pass direction)
array(False)
- samples_flipped()boolTrue
- meaning :
- xsar convention : increasing incidence values along samples axis
array(True)
- sampleSpacing()float641e+03
- referential :
- ground
- units :
- m
array(1000.)
- lineSpacing()float641e+03
- units :
- m
array(1000.)
- sigma0_raw(pol, line, sample)float64dask.array<chunksize=(1, 382, 360), meta=np.ndarray>
- pixelFirstLutValue :
- 18041
- stepSize :
- -23
- numberOfValues :
- 786
- offset :
- 0.0
Array Chunk Bytes 2.10 MiB 1.05 MiB Shape (2, 382, 360) (1, 382, 360) Dask graph 2 chunks in 20 graph layers Data type float64 numpy.ndarray - nesz(pol, line, sample)float32dask.array<chunksize=(1, 382, 360), meta=np.ndarray>
Array Chunk Bytes 1.05 MiB 537.19 kiB Shape (2, 382, 360) (1, 382, 360) Dask graph 2 chunks in 11 graph layers Data type float32 numpy.ndarray - gamma0_raw(pol, line, sample)float64dask.array<chunksize=(1, 382, 360), meta=np.ndarray>
- pixelFirstLutValue :
- 18041
- stepSize :
- -23
- numberOfValues :
- 786
- offset :
- 0.0
Array Chunk Bytes 2.10 MiB 1.05 MiB Shape (2, 382, 360) (1, 382, 360) Dask graph 2 chunks in 20 graph layers Data type float64 numpy.ndarray - negz(pol, line, sample)float32dask.array<chunksize=(1, 382, 360), meta=np.ndarray>
Array Chunk Bytes 1.05 MiB 537.19 kiB Shape (2, 382, 360) (1, 382, 360) Dask graph 2 chunks in 11 graph layers Data type float32 numpy.ndarray - beta0_raw(pol, line, sample)float64dask.array<chunksize=(1, 382, 360), meta=np.ndarray>
- pixelFirstLutValue :
- 18041
- stepSize :
- -23
- numberOfValues :
- 786
- offset :
- 0.0
Array Chunk Bytes 2.10 MiB 1.05 MiB Shape (2, 382, 360) (1, 382, 360) Dask graph 2 chunks in 20 graph layers Data type float64 numpy.ndarray - nebz(pol, line, sample)float32dask.array<chunksize=(1, 382, 360), meta=np.ndarray>
Array Chunk Bytes 1.05 MiB 537.19 kiB Shape (2, 382, 360) (1, 382, 360) Dask graph 2 chunks in 11 graph layers Data type float32 numpy.ndarray - sigma0(pol, line, sample)float64dask.array<chunksize=(1, 382, 360), meta=np.ndarray>
- comment :
- not clipped, some values can be <0
Array Chunk Bytes 2.10 MiB 1.05 MiB Shape (2, 382, 360) (1, 382, 360) Dask graph 2 chunks in 31 graph layers Data type float64 numpy.ndarray - beta0(pol, line, sample)float64dask.array<chunksize=(1, 382, 360), meta=np.ndarray>
- comment :
- not clipped, some values can be <0
Array Chunk Bytes 2.10 MiB 1.05 MiB Shape (2, 382, 360) (1, 382, 360) Dask graph 2 chunks in 31 graph layers Data type float64 numpy.ndarray - gamma0(pol, line, sample)float64dask.array<chunksize=(1, 382, 360), meta=np.ndarray>
- comment :
- not clipped, some values can be <0
Array Chunk Bytes 2.10 MiB 1.05 MiB Shape (2, 382, 360) (1, 382, 360) Dask graph 2 chunks in 31 graph layers Data type float64 numpy.ndarray - land_mask(line, sample)int8dask.array<chunksize=(382, 360), meta=np.ndarray>
- history :
- land_mask: cartopy.feature.NaturalEarthFeature land
- meaning :
- 0: ocean , 1: land
Array Chunk Bytes 134.30 kiB 134.30 kiB Shape (382, 360) (382, 360) Dask graph 1 chunks in 3 graph layers Data type int8 numpy.ndarray - ground_heading(line, sample)float32dask.array<chunksize=(382, 360), meta=np.ndarray>
- comment :
- at ground level, computed from lon/lat in azimuth direction
- long_name :
- Platform heading (azimuth from North)
- units :
- Degrees
Array Chunk Bytes 537.19 kiB 537.19 kiB Shape (382, 360) (382, 360) Dask graph 1 chunks in 4 graph layers Data type float32 numpy.ndarray - latitude(line, sample)float64dask.array<chunksize=(382, 360), meta=np.ndarray>
Array Chunk Bytes 1.05 MiB 1.05 MiB Shape (382, 360) (382, 360) Dask graph 1 chunks in 4 graph layers Data type float64 numpy.ndarray - longitude(line, sample)float64dask.array<chunksize=(382, 360), meta=np.ndarray>
Array Chunk Bytes 1.05 MiB 1.05 MiB Shape (382, 360) (382, 360) Dask graph 1 chunks in 4 graph layers Data type float64 numpy.ndarray - altitude(line, sample)float64dask.array<chunksize=(382, 360), meta=np.ndarray>
Array Chunk Bytes 1.05 MiB 1.05 MiB Shape (382, 360) (382, 360) Dask graph 1 chunks in 4 graph layers Data type float64 numpy.ndarray - incidence(line, sample)float32dask.array<chunksize=(382, 360), meta=np.ndarray>
Array Chunk Bytes 537.19 kiB 537.19 kiB Shape (382, 360) (382, 360) Dask graph 1 chunks in 5 graph layers Data type float32 numpy.ndarray - elevation(line, sample)float64dask.array<chunksize=(382, 360), meta=np.ndarray>
Array Chunk Bytes 1.05 MiB 1.05 MiB Shape (382, 360) (382, 360) Dask graph 1 chunks in 12 graph layers Data type float64 numpy.ndarray
- linePandasIndex
PandasIndex(Index([ 24.5, 74.5, 124.5, 174.5, 224.5, 274.5, 324.5, 374.5, 424.5, 474.5, ... 18624.5, 18674.5, 18724.5, 18774.5, 18824.5, 18874.5, 18924.5, 18974.5, 19024.5, 19074.5], dtype='float64', name='line', length=382)) - polPandasIndex
PandasIndex(Index(['HH', 'HV'], dtype='object', name='pol'))
- samplePandasIndex
PandasIndex(Index([ 24.5, 74.5, 124.5, 174.5, 224.5, 274.5, 324.5, 374.5, 424.5, 474.5, ... 17524.5, 17574.5, 17624.5, 17674.5, 17724.5, 17774.5, 17824.5, 17874.5, 17924.5, 17974.5], dtype='float64', name='sample', length=360))
- name :
- RCM_DS:/home1/scratch/agrouaze/xsardatasync/xsardata/RCM1_OK1050603_PK1050605_1_SC50MB_20200214_115905_HH_HV_Z010:
- short_name :
- RCM_DS:RCM1_OK1050603_PK1050605_1_SC50MB_20200214_115905_HH_HV_Z010:
- product :
- Z010
- safe :
- RCM1_OK1050603_PK1050605_1_SC50MB_20200214_115905_HH_HV_Z010
- swath :
- SC50MB
- multidataset :
- False
- copyright :
- RCM Data and Products (c) CSA, 2020 - All Rights Reserved.
- productId :
- 1050605_1
- documentIdentifier :
- RCM-SP-53-0419, Issue 2/5
- securityClassification :
- Non classifié / Unclassified
- pols :
- HH HV
- start_date :
- 2020-02-14 11:59:03.000000
- stop_date :
- 2020-02-14 12:00:02.000000
- footprint :
- POLYGON ((-84.63397773377159 48.71534850877886, -89.49513011173734 49.25784540666172, -90.20716719088948 45.86157135154452, -85.64696859864004 45.32177593908131, -84.63397773377159 48.71534850877886))
- coverage :
- 381km * 359km (line * sample )
- pixel_line_m :
- 20.0
- pixel_sample_m :
- 20.0
- approx_transform :
- |-0.00,-0.00,-84.71| |-0.00, 0.00, 48.73| | 0.00, 0.00, 1.00|
[14]:
# Open datatree
xsar.open_datatree(path, resolution=resolution)
[14]:
<xarray.DatasetView> Size: 0B
Dimensions: ()
Data variables:
*empty*
Attributes: (12/18)
name: RCM_DS:/home1/scratch/agrouaze/xsardatasync/xsar...
short_name: RCM_DS:RCM1_OK1050603_PK1050605_1_SC50MB_2020021...
product: Z010
safe: RCM1_OK1050603_PK1050605_1_SC50MB_20200214_11590...
swath: SC50MB
multidataset: False
... ...
stop_date: 2020-02-14 12:00:02.000000
footprint: POLYGON ((-84.63397773377159 48.71534850877886, ...
coverage: 381km * 359km (line * sample )
pixel_line_m: 20.0
pixel_sample_m: 20.0
approx_transform: |-0.00,-0.00,-84.71|\n|-0.00, 0.00, 48.73|\n| 0....- line: 382
- pol: 2
- sample: 360
- line(line)float6424.5 74.5 ... 1.902e+04 1.907e+04
array([ 24.5, 74.5, 124.5, ..., 18974.5, 19024.5, 19074.5])
- pol(pol)<U2'HH' 'HV'
array(['HH', 'HV'], dtype='<U2')
- sample(sample)float6424.5 74.5 ... 1.792e+04 1.797e+04
array([ 24.5, 74.5, 124.5, ..., 17874.5, 17924.5, 17974.5])
- digital_number(pol, line, sample)uint16dask.array<chunksize=(1, 382, 360), meta=np.ndarray>
- comment :
- not denoised digital number, resampled at "1000m" with rasterio.enums.Resampling.rms
- history :
- digital_number: imagery/1050605_1_H*.tif
Array Chunk Bytes 537.19 kiB 268.59 kiB Shape (2, 382, 360) (1, 382, 360) Dask graph 2 chunks in 4 graph layers Data type uint16 numpy.ndarray - lines_flipped()boolFalse
- meaning :
- xsar convention : increasing time along line axis (whatever ascending or descending pass direction)
array(False)
- samples_flipped()boolTrue
- meaning :
- xsar convention : increasing incidence values along samples axis
array(True)
- sampleSpacing()float641e+03
- referential :
- ground
- units :
- m
array(1000.)
- lineSpacing()float641e+03
- units :
- m
array(1000.)
- sigma0_raw(pol, line, sample)float64dask.array<chunksize=(1, 382, 360), meta=np.ndarray>
- pixelFirstLutValue :
- 18041
- stepSize :
- -23
- numberOfValues :
- 786
- offset :
- 0.0
Array Chunk Bytes 2.10 MiB 1.05 MiB Shape (2, 382, 360) (1, 382, 360) Dask graph 2 chunks in 20 graph layers Data type float64 numpy.ndarray - nesz(pol, line, sample)float32dask.array<chunksize=(1, 382, 360), meta=np.ndarray>
Array Chunk Bytes 1.05 MiB 537.19 kiB Shape (2, 382, 360) (1, 382, 360) Dask graph 2 chunks in 11 graph layers Data type float32 numpy.ndarray - gamma0_raw(pol, line, sample)float64dask.array<chunksize=(1, 382, 360), meta=np.ndarray>
- pixelFirstLutValue :
- 18041
- stepSize :
- -23
- numberOfValues :
- 786
- offset :
- 0.0
Array Chunk Bytes 2.10 MiB 1.05 MiB Shape (2, 382, 360) (1, 382, 360) Dask graph 2 chunks in 20 graph layers Data type float64 numpy.ndarray - negz(pol, line, sample)float32dask.array<chunksize=(1, 382, 360), meta=np.ndarray>
Array Chunk Bytes 1.05 MiB 537.19 kiB Shape (2, 382, 360) (1, 382, 360) Dask graph 2 chunks in 11 graph layers Data type float32 numpy.ndarray - beta0_raw(pol, line, sample)float64dask.array<chunksize=(1, 382, 360), meta=np.ndarray>
- pixelFirstLutValue :
- 18041
- stepSize :
- -23
- numberOfValues :
- 786
- offset :
- 0.0
Array Chunk Bytes 2.10 MiB 1.05 MiB Shape (2, 382, 360) (1, 382, 360) Dask graph 2 chunks in 20 graph layers Data type float64 numpy.ndarray - nebz(pol, line, sample)float32dask.array<chunksize=(1, 382, 360), meta=np.ndarray>
Array Chunk Bytes 1.05 MiB 537.19 kiB Shape (2, 382, 360) (1, 382, 360) Dask graph 2 chunks in 11 graph layers Data type float32 numpy.ndarray - sigma0(pol, line, sample)float64dask.array<chunksize=(1, 382, 360), meta=np.ndarray>
- comment :
- not clipped, some values can be <0
Array Chunk Bytes 2.10 MiB 1.05 MiB Shape (2, 382, 360) (1, 382, 360) Dask graph 2 chunks in 31 graph layers Data type float64 numpy.ndarray - beta0(pol, line, sample)float64dask.array<chunksize=(1, 382, 360), meta=np.ndarray>
- comment :
- not clipped, some values can be <0
Array Chunk Bytes 2.10 MiB 1.05 MiB Shape (2, 382, 360) (1, 382, 360) Dask graph 2 chunks in 31 graph layers Data type float64 numpy.ndarray - gamma0(pol, line, sample)float64dask.array<chunksize=(1, 382, 360), meta=np.ndarray>
- comment :
- not clipped, some values can be <0
Array Chunk Bytes 2.10 MiB 1.05 MiB Shape (2, 382, 360) (1, 382, 360) Dask graph 2 chunks in 31 graph layers Data type float64 numpy.ndarray - land_mask(line, sample)int8dask.array<chunksize=(382, 360), meta=np.ndarray>
- history :
- land_mask: cartopy.feature.NaturalEarthFeature land
- meaning :
- 0: ocean , 1: land
Array Chunk Bytes 134.30 kiB 134.30 kiB Shape (382, 360) (382, 360) Dask graph 1 chunks in 3 graph layers Data type int8 numpy.ndarray - ground_heading(line, sample)float32dask.array<chunksize=(382, 360), meta=np.ndarray>
- comment :
- at ground level, computed from lon/lat in azimuth direction
- long_name :
- Platform heading (azimuth from North)
- units :
- Degrees
Array Chunk Bytes 537.19 kiB 537.19 kiB Shape (382, 360) (382, 360) Dask graph 1 chunks in 4 graph layers Data type float32 numpy.ndarray - latitude(line, sample)float64dask.array<chunksize=(382, 360), meta=np.ndarray>
Array Chunk Bytes 1.05 MiB 1.05 MiB Shape (382, 360) (382, 360) Dask graph 1 chunks in 4 graph layers Data type float64 numpy.ndarray - longitude(line, sample)float64dask.array<chunksize=(382, 360), meta=np.ndarray>
Array Chunk Bytes 1.05 MiB 1.05 MiB Shape (382, 360) (382, 360) Dask graph 1 chunks in 4 graph layers Data type float64 numpy.ndarray - altitude(line, sample)float64dask.array<chunksize=(382, 360), meta=np.ndarray>
Array Chunk Bytes 1.05 MiB 1.05 MiB Shape (382, 360) (382, 360) Dask graph 1 chunks in 4 graph layers Data type float64 numpy.ndarray - incidence(line, sample)float32dask.array<chunksize=(382, 360), meta=np.ndarray>
Array Chunk Bytes 537.19 kiB 537.19 kiB Shape (382, 360) (382, 360) Dask graph 1 chunks in 5 graph layers Data type float32 numpy.ndarray - elevation(line, sample)float64dask.array<chunksize=(382, 360), meta=np.ndarray>
Array Chunk Bytes 1.05 MiB 1.05 MiB Shape (382, 360) (382, 360) Dask graph 1 chunks in 12 graph layers Data type float64 numpy.ndarray
<xarray.DatasetView> Size: 23MB Dimensions: (line: 382, pol: 2, sample: 360) Coordinates: * line (line) float64 3kB 24.5 74.5 124.5 ... 1.902e+04 1.907e+04 * pol (pol) <U2 16B 'HH' 'HV' * sample (sample) float64 3kB 24.5 74.5 ... 1.792e+04 1.797e+04 Data variables: (12/21) digital_number (pol, line, sample) uint16 550kB dask.array<chunksize=(1, 382, 360), meta=np.ndarray> lines_flipped bool 1B False samples_flipped bool 1B True sampleSpacing float64 8B 1e+03 lineSpacing float64 8B 1e+03 sigma0_raw (pol, line, sample) float64 2MB dask.array<chunksize=(1, 382, 360), meta=np.ndarray> ... ... ground_heading (line, sample) float32 550kB dask.array<chunksize=(382, 360), meta=np.ndarray> latitude (line, sample) float64 1MB dask.array<chunksize=(382, 360), meta=np.ndarray> longitude (line, sample) float64 1MB dask.array<chunksize=(382, 360), meta=np.ndarray> altitude (line, sample) float64 1MB dask.array<chunksize=(382, 360), meta=np.ndarray> incidence (line, sample) float32 550kB dask.array<chunksize=(382, 360), meta=np.ndarray> elevation (line, sample) float64 1MB dask.array<chunksize=(382, 360), meta=np.ndarray>measurement- line: 13
- pixel: 13
- line(line)float640.0 1.594e+03 ... 1.913e+04
array([ 0. , 1593.8334, 3187.6667, 4781.5 , 6375.3335, 7969.167 , 9563. , 11156.833 , 12750.666 , 14344.499 , 15938.332 , 17532.166 , 19126. ]) - pixel(pixel)float640.0 1.503e+03 ... 1.804e+04
array([ 0. , 1503.4166, 3006.8333, 4510.25 , 6013.6665, 7517.083 , 9020.5 , 10523.917 , 12027.334 , 13530.751 , 15034.168 , 16537.584 , 18041. ])
- latitude(line, pixel)float6448.72 48.77 48.82 ... 45.82 45.86
- units :
- deg
array([[48.71534851, 48.76832408, 48.81990431, 48.87008388, 48.9188575 , 48.96622008, 49.0121666 , 49.05669221, 49.09979216, 49.14146184, 49.18169682, 49.22049275, 49.25784541], [48.43281212, 48.48568175, 48.53716957, 48.58727035, 48.6359789 , 48.68329019, 48.72919932, 48.77370149, 48.81679205, 48.85846644, 48.89872032, 48.9375494 , 48.97494952], [48.15022622, 48.20299289, 48.25439115, 48.30441584, 48.35306187, 48.4003243 , 48.44619829, 48.49067914, 48.53376227, 48.57544319, 48.61571763, 48.65458135, 48.69203027], [47.86759144, 47.92025809, 47.97156956, 48.02152082, 48.07010684, 48.11732276, 48.16316384, 48.20762544, 48.25070306, 48.29239228, 48.3326889 , 48.37158874, 48.40908778], [47.58490836, 47.63747783, 47.68870526, 47.73858567, 47.78711413, 47.83428587, 47.88009621, 47.92454059, 47.96761458, 48.00931384, 48.04963421, 48.08857161, 48.12612205], [47.30217761, 47.35465272, 47.40579877, 47.45561087, 47.50408419, 47.551214 , 47.59699572, 47.64142487, 47.68449708, 47.72620807, 47.76655376, 47.80553012, 47.84313321], [47.01939987, 47.07178337, 47.12285066, 47.17259694, 47.22101746, 47.26810757, 47.31386276, 47.35827862, 47.40135085, 47.44307524, 47.48344777, 47.52246445, 47.56012144], [46.73657564, 46.78887021, 46.83986131, 46.88954421, 46.93791423, 46.98496681, 47.03069751, 47.07510199, 47.11817601, 47.15991542, 47.20031628, 47.23937464, 47.27708672], [46.45370547, 46.50591375, 46.55683117, 46.60645308, 46.65477487, 46.70179205, 46.74750026, 46.79189521, 46.83497275, 46.87672879, 46.91715942, 46.95626079, 46.99402914], [46.17078992, 46.2229145 , 46.2737607 , 46.32332395, 46.37159972, 46.41858359, 46.46427126, 46.50865852, 46.55174128, 46.5935155 , 46.63397734, 46.673123 , 46.71094878], [45.88782952, 45.93987293, 45.99065033, 46.04015721, 46.08838913, 46.13534173, 46.18101079, 46.22539215, 46.26848178, 46.31027571, 46.35077016, 46.38996138, 46.42784571], [45.60482463, 45.65678935, 45.70750031, 45.75695308, 45.80514327, 45.85206661, 45.89771892, 45.94209613, 45.98519426, 46.02700941, 46.06753784, 46.10677585, 46.14471985], [45.32177594, 45.37366438, 45.4243112 , 45.47371204, 45.52186258, 45.56875861, 45.61439602, 45.65877079, 45.70187902, 45.74371684, 45.78428058, 45.8235666 , 45.86157135]]) - longitude(line, pixel)float64-84.63 -85.03 ... -89.82 -90.21
- units :
- deg
array([[-84.63397773, -85.03485893, -85.43657252, -85.83909967, -86.24242065, -86.64651572, -87.05136479, -87.45694747, -87.86324307, -88.27023034, -88.67788853, -89.08619582, -89.49513011], [-84.72181616, -85.12049999, -85.52000188, -85.92030343, -86.32138545, -86.72322865, -87.12581347, -87.52912005, -87.93312821, -88.33781725, -88.74316696, -89.14915607, -89.55576306], [-84.80898835, -85.20550748, -85.60283064, -86.00093993, -86.3998166 , -86.79944187, -87.19979668, -87.60086164, -88.00261712, -88.40504292, -88.80811937, -89.21182575, -89.61614106], [-84.89550825, -85.28989472, -85.68507155, -86.08102127, -86.47772559, -86.87516623, -87.27332458, -87.67218176, -88.07171864, -88.47191552, -88.87275325, -89.27421163, -89.67627021], [-84.98138947, -85.37367476, -85.76673703, -86.16055926, -86.55512363, -86.95041229, -87.34640711, -87.74308971, -88.14044141, -88.53844303, -88.93707591, -89.33632037, -89.73615646], ... [-85.31878745, -85.70297133, -86.08788173, -86.47350326, -86.85981979, -87.24681519, -87.6344731 , -88.02277689, -88.41170973, -88.80125428, -89.19139374, -89.58211033, -89.97338607], [-85.40166741, -85.78389909, -86.16684537, -86.55049124, -86.93482099, -87.31981887, -87.70546893, -88.09175498, -88.47866058, -88.86616884, -89.2542634 , -89.64292693, -90.03214187], [-85.48398335, -85.86429106, -86.24530171, -86.62700068, -87.00937263, -87.39240221, -87.77607387, -88.16037182, -88.54528004, -88.93078206, -89.31686194, -89.70350278, -90.09068748], [-85.56574673, -85.9441582 , -86.32326121, -86.7030415 , -87.08348412, -87.4645741 , -87.84629628, -88.22863524, -88.6115754 , -88.99510067, -89.37919553, -89.76384351, -90.14902793], [-85.6469686 , -86.02351092, -86.40073367, -86.77862293, -87.1571641 , -87.53634258, -87.9161436 , -88.29655212, -88.67755293, -89.05913037, -89.4412693 , -89.82395366, -90.20716719]]) - height(line, pixel)float64229.9 229.9 229.9 ... 229.9 229.9
- units :
- m
array([[229.93099567, 229.93099567, 229.93099567, 229.93099567, 229.93099567, 229.93099567, 229.93099567, 229.93099567, 229.93099567, 229.93099567, 229.93099567, 229.93099567, 229.93099567], [229.93099567, 229.93099567, 229.93099567, 229.93099567, 229.93099567, 229.93099567, 229.93099567, 229.93099567, 229.93099567, 229.93099567, 229.93099567, 229.93099567, 229.93099567], [229.93099567, 229.93099567, 229.93099567, 229.93099567, 229.93099567, 229.93099567, 229.93099567, 229.93099567, 229.93099567, 229.93099567, 229.93099567, 229.93099567, 229.93099567], [229.93099567, 229.93099567, 229.93099567, 229.93099567, 229.93099567, 229.93099567, 229.93099567, 229.93099567, 229.93099567, 229.93099567, 229.93099567, 229.93099567, 229.93099567], [229.93099567, 229.93099567, 229.93099567, 229.93099567, 229.93099567, 229.93099567, 229.93099567, 229.93099567, 229.93099567, 229.93099567, 229.93099567, 229.93099567, 229.93099567], ... [229.93099567, 229.93099567, 229.93099567, 229.93099567, 229.93099567, 229.93099567, 229.93099567, 229.93099567, 229.93099567, 229.93099567, 229.93099567, 229.93099567, 229.93099567], [229.93099567, 229.93099567, 229.93099567, 229.93099567, 229.93099567, 229.93099567, 229.93099567, 229.93099567, 229.93099567, 229.93099567, 229.93099567, 229.93099567, 229.93099567], [229.93099567, 229.93099567, 229.93099567, 229.93099567, 229.93099567, 229.93099567, 229.93099567, 229.93099567, 229.93099567, 229.93099567, 229.93099567, 229.93099567, 229.93099567], [229.93099567, 229.93099567, 229.93099567, 229.93099567, 229.93099567, 229.93099567, 229.93099567, 229.93099567, 229.93099567, 229.93099567, 229.93099567, 229.93099567, 229.93099567], [229.93099567, 229.93099567, 229.93099567, 229.93099567, 229.93099567, 229.93099567, 229.93099567, 229.93099567, 229.93099567, 229.93099567, 229.93099567, 229.93099567, 229.93099567]])
- footprint :
- POLYGON ((-84.63397773377159 48.71534850877886, -89.49513011173734 49.25784540666172, -90.20716719088948 45.86157135154452, -85.64696859864004 45.32177593908131, -84.63397773377159 48.71534850877886))
- history :
- annotations
<xarray.DatasetView> Size: 4kB Dimensions: (line: 13, pixel: 13) Coordinates: * line (line) float64 104B 0.0 1.594e+03 ... 1.753e+04 1.913e+04 * pixel (pixel) float64 104B 0.0 1.503e+03 ... 1.654e+04 1.804e+04 Data variables: latitude (line, pixel) float64 1kB 48.72 48.77 48.82 ... 45.78 45.82 45.86 longitude (line, pixel) float64 1kB -84.63 -85.03 -85.44 ... -89.82 -90.21 height (line, pixel) float64 1kB 229.9 229.9 229.9 ... 229.9 229.9 229.9 Attributes: footprint: POLYGON ((-84.63397773377159 48.71534850877886, -89.495130111... history: annotationsgeolocation_annotation- beam: 8
- pole: 2
- burst: 24
- beam(beam)<U5'SC-10' 'SC-3' ... 'SC-8' 'SC-9'
array(['SC-10', 'SC-3', 'SC-4', 'SC-5', 'SC-6', 'SC-7', 'SC-8', 'SC-9'], dtype='<U5') - pole(pole)<U2'HH' 'HV'
array(['HH', 'HV'], dtype='<U2')
- burst(burst)int640 1 2 3 4 5 ... 617 618 619 620 621
array([ 0, 1, 2, 3, 4, 5, 6, 7, 102, 105, 358, 359, 360, 362, 363, 364, 365, 615, 616, 617, 618, 619, 620, 621])
- rawLine(beam, pole, burst)float64nan nan nan nan ... nan nan nan nan
array([[[ nan, nan, nan, nan, nan, nan, nan, 1222., nan, nan, nan, 63218., nan, nan, nan, nan, nan, 108306., nan, nan, nan, nan, nan, nan], [ nan, nan, nan, nan, nan, nan, nan, 1222., nan, nan, nan, 63218., nan, nan, nan, nan, nan, 108306., nan, nan, nan, nan, nan, nan]], [[ 0., nan, nan, nan, nan, nan, nan, nan, nan, nan, nan, nan, 63405., nan, nan, nan, nan, nan, 108493., nan, nan, nan, nan, nan], [ 0., nan, nan, nan, nan, nan, nan, nan, nan, nan, nan, nan, 63405., nan, nan, nan, nan, nan, 108493., nan, nan, nan, nan, nan]], [[ nan, 159., nan, nan, nan, nan, nan, nan, nan, 18476., nan, nan, nan, nan, ... nan, 64067., nan, nan, nan, nan, nan, nan, 109155., nan]], [[ nan, nan, nan, nan, nan, 849., nan, nan, nan, nan, nan, nan, nan, nan, nan, nan, 64254., nan, nan, nan, nan, nan, nan, 109342.], [ nan, nan, nan, nan, nan, 849., nan, nan, nan, nan, nan, nan, nan, nan, nan, nan, 64254., nan, nan, nan, nan, nan, nan, 109342.]], [[ nan, nan, nan, nan, nan, nan, 1022., nan, 17930., nan, 63018., nan, nan, nan, nan, nan, nan, nan, nan, nan, nan, nan, nan, nan], [ nan, nan, nan, nan, nan, nan, 1022., nan, 17930., nan, 63018., nan, nan, nan, nan, nan, nan, nan, nan, nan, nan, nan, nan, nan]]]) - pulseRepetitionFrequency(beam, pole, burst)float64nan nan nan nan ... nan nan nan nan
- units :
- Hz
array([[[ nan, nan, nan, nan, nan, nan, nan, 2488.80039821, nan, nan, nan, 2490.03984064, nan, nan, nan, nan, nan, 2491.28051819, nan, nan, nan, nan, nan, nan], [ nan, nan, nan, nan, nan, nan, nan, 2488.80039821, nan, nan, nan, 2490.03984064, nan, nan, nan, nan, nan, 2491.28051819, nan, nan, nan, nan, nan, nan]], [[2782.41513634, nan, nan, nan, nan, nan, nan, nan, nan, nan, nan, nan, 2783.96436526, nan, nan, nan, nan, nan, 2785.51532033, nan, nan, nan, nan, nan], [2782.41513634, nan, nan, nan, ... nan, nan, nan, 2507.5225677 ], [ nan, nan, nan, nan, nan, 2505.01002004, nan, nan, nan, nan, nan, nan, nan, nan, nan, nan, 2506.26566416, nan, nan, nan, nan, nan, nan, 2507.5225677 ]], [[ nan, nan, nan, nan, nan, nan, 2765.48672566, nan, 2767.01715551, nan, 2768.54928018, nan, nan, nan, nan, nan, nan, nan, nan, nan, nan, nan, nan, nan], [ nan, nan, nan, nan, nan, nan, 2765.48672566, nan, 2767.01715551, nan, 2768.54928018, nan, nan, nan, nan, nan, nan, nan, nan, nan, nan, nan, nan, nan]]])
<xarray.DatasetView> Size: 7kB Dimensions: (beam: 8, pole: 2, burst: 24) Coordinates: * beam (beam) <U5 160B 'SC-10' 'SC-3' ... 'SC-8' 'SC-9' * pole (pole) <U2 16B 'HH' 'HV' * burst (burst) int64 192B 0 1 2 3 4 ... 618 619 620 621 Data variables: rawLine (beam, pole, burst) float64 3kB nan nan ... nan pulseRepetitionFrequency (beam, pole, burst) float64 3kB nan nan ... nanprfInformation- beams: 8
- polarizations: 2
- pulses: 8
- beam: 8
- pole: 2
- beams(beams)<U5'SC-3' 'SC-4' ... 'SC-9' 'SC-10'
array(['SC-3', 'SC-4', 'SC-5', 'SC-6', 'SC-7', 'SC-8', 'SC-9', 'SC-10'], dtype='<U5') - polarizations(polarizations)<U2'HH' 'HV'
array(['HH', 'HV'], dtype='<U2')
- pulses(pulses)<U6'250036' '220030' ... '150036'
array(['250036', '220030', '190030', '175034', '175034', '160036', '150030', '150036'], dtype='<U6') - beam(beam)<U5'SC-10' 'SC-3' ... 'SC-8' 'SC-9'
array(['SC-10', 'SC-3', 'SC-4', 'SC-5', 'SC-6', 'SC-7', 'SC-8', 'SC-9'], dtype='<U5') - pole(pole)<U2'HH' 'HV'
array(['HH', 'HV'], dtype='<U2')
- pulsesReceivedPerDwell(beam)int64185 159 158 172 171 185 172 197
array([185, 159, 158, 172, 171, 185, 172, 197])
- numberOfPulseIntervalsPerDwell(beam)int64199 171 170 185 184 199 185 212
array([199, 171, 170, 185, 184, 199, 185, 212])
- burstDelay()float645.36e-05
- units :
- us
array(5.36e-05)
- rank(beam)int6414 12 12 13 13 14 13 15
array([14, 12, 12, 13, 13, 14, 13, 15])
- settableGain(beam, pole)float64-18.9 -19.7 -18.9 ... -18.9 -19.7
- units :
- dB
array([[-18.9, -19.7], [-18.9, -19.7], [-18.9, -19.7], [-18.9, -19.7], [-18.9, -19.7], [-18.9, -19.7], [-18.9, -19.7], [-18.9, -19.7]]) - radarCenterFrequency()float645.405e+09
- units :
- Hz
array(5.405e+09)
- pulseLength(beam)float643.6e-05 3.6e-05 ... 3.6e-05 3e-05
- units :
- s
array([3.6e-05, 3.6e-05, 3.0e-05, 3.0e-05, 3.4e-05, 3.4e-05, 3.6e-05, 3.0e-05]) - pulseBandwidth(beam)float641.5e+07 2.5e+07 ... 1.6e+07 1.5e+07
- units :
- Hz
array([15000000., 25000000., 22000000., 19000000., 17500000., 17500000., 16000000., 15000000.]) - samplingWindowStartTimeFirstRawLine(beam, pole)float648.1e-05 8.1e-05 ... 6.4e-05 6.4e-05
- units :
- s
array([[8.100e-05, 8.100e-05], [1.044e-04, 1.044e-04], [7.720e-05, 7.720e-05], [8.640e-05, 8.640e-05], [8.620e-05, 8.620e-05], [7.400e-05, 7.400e-05], [8.940e-05, 8.940e-05], [6.400e-05, 6.400e-05]]) - samplingWindowStartTimeLastRawLine(beam, pole)float647.92e-05 7.92e-05 ... 6.3e-05
- units :
- s
array([[7.920e-05, 7.920e-05], [1.034e-04, 1.034e-04], [7.620e-05, 7.620e-05], [8.560e-05, 8.560e-05], [8.500e-05, 8.500e-05], [7.300e-05, 7.300e-05], [8.780e-05, 8.780e-05], [6.300e-05, 6.300e-05]]) - numberOfSwstChanges(beam, pole)int643 3 3 3 2 2 3 3 3 3 3 3 3 3 3 3
array([[3, 3], [3, 3], [2, 2], [3, 3], [3, 3], [3, 3], [3, 3], [3, 3]]) - adcSamplingRate(beam)float641.654e+07 2.688e+07 ... 1.654e+07
- units :
- Hz
array([16538461.53846154, 26875000. , 23888888.88888889, 21500000. , 19545454.54545455, 19545454.54545455, 17916666.66666667, 16538461.53846154]) - samplesPerEchoLine(beam)int644578 5053 4754 ... 4781 4619 4330
array([4578, 5053, 4754, 4610, 4535, 4781, 4619, 4330])
- acquisitionType :
- Medium Resolution 50m
- antennaPointing :
- Right
- zeroDopplerSteeringFlag :
- ZeroDopplerSteeringOn
- satOrientationRefFrame :
- Geocentric
- rawBitsPerSample :
- 3
- steppedReceiveMode :
- True
<xarray.DatasetView> Size: 2kB Dimensions: (beams: 8, polarizations: 2, pulses: 8, beam: 8, pole: 2) Coordinates: * beams (beams) <U5 160B 'SC-3' ... 'SC-10' * polarizations (polarizations) <U2 16B 'HH' 'HV' * pulses (pulses) <U6 192B '250036' ... '150036' * beam (beam) <U5 160B 'SC-10' ... 'SC-9' * pole (pole) <U2 16B 'HH' 'HV' Data variables: (12/13) pulsesReceivedPerDwell (beam) int64 64B 185 159 ... 172 197 numberOfPulseIntervalsPerDwell (beam) int64 64B 199 171 ... 185 212 burstDelay float64 8B 5.36e-05 rank (beam) int64 64B 14 12 12 ... 14 13 15 settableGain (beam, pole) float64 128B -18.9 ... ... radarCenterFrequency float64 8B 5.405e+09 ... ... pulseBandwidth (beam) float64 64B 1.5e+07 ... 1.5e+07 samplingWindowStartTimeFirstRawLine (beam, pole) float64 128B 8.1e-05 ..... samplingWindowStartTimeLastRawLine (beam, pole) float64 128B 7.92e-05 .... numberOfSwstChanges (beam, pole) int64 128B 3 3 3 ... 3 3 3 adcSamplingRate (beam) float64 64B 1.654e+07 ... 1.6... samplesPerEchoLine (beam) int64 64B 4578 5053 ... 4330 Attributes: acquisitionType: Medium Resolution 50m antennaPointing: Right zeroDopplerSteeringFlag: ZeroDopplerSteeringOn satOrientationRefFrame: Geocentric rawBitsPerSample: 3 steppedReceiveMode: TrueradarParameters- timeStamp: 60
- timeStamp(timeStamp)datetime64[ns]2020-02-14T11:59:03 ... 2020-02-...
array(['2020-02-14T11:59:03.000000000', '2020-02-14T11:59:04.000000000', '2020-02-14T11:59:05.000000000', '2020-02-14T11:59:06.000000000', '2020-02-14T11:59:07.000000000', '2020-02-14T11:59:08.000000000', '2020-02-14T11:59:09.000000000', '2020-02-14T11:59:10.000000000', '2020-02-14T11:59:11.000000000', '2020-02-14T11:59:12.000000000', '2020-02-14T11:59:13.000000000', '2020-02-14T11:59:14.000000000', '2020-02-14T11:59:15.000000000', '2020-02-14T11:59:16.000000000', '2020-02-14T11:59:17.000000000', '2020-02-14T11:59:18.000000000', '2020-02-14T11:59:19.000000000', '2020-02-14T11:59:20.000000000', '2020-02-14T11:59:21.000000000', '2020-02-14T11:59:22.000000000', '2020-02-14T11:59:23.000000000', '2020-02-14T11:59:24.000000000', '2020-02-14T11:59:25.000000000', '2020-02-14T11:59:26.000000000', '2020-02-14T11:59:27.000000000', '2020-02-14T11:59:28.000000000', '2020-02-14T11:59:29.000000000', '2020-02-14T11:59:30.000000000', '2020-02-14T11:59:31.000000000', '2020-02-14T11:59:32.000000000', '2020-02-14T11:59:33.000000000', '2020-02-14T11:59:34.000000000', '2020-02-14T11:59:35.000000000', '2020-02-14T11:59:36.000000000', '2020-02-14T11:59:37.000000000', '2020-02-14T11:59:38.000000000', '2020-02-14T11:59:39.000000000', '2020-02-14T11:59:40.000000000', '2020-02-14T11:59:41.000000000', '2020-02-14T11:59:42.000000000', '2020-02-14T11:59:43.000000000', '2020-02-14T11:59:44.000000000', '2020-02-14T11:59:45.000000000', '2020-02-14T11:59:46.000000000', '2020-02-14T11:59:47.000000000', '2020-02-14T11:59:48.000000000', '2020-02-14T11:59:49.000000000', '2020-02-14T11:59:50.000000000', '2020-02-14T11:59:51.000000000', '2020-02-14T11:59:52.000000000', '2020-02-14T11:59:53.000000000', '2020-02-14T11:59:54.000000000', '2020-02-14T11:59:55.000000000', '2020-02-14T11:59:56.000000000', '2020-02-14T11:59:57.000000000', '2020-02-14T11:59:58.000000000', '2020-02-14T11:59:59.000000000', '2020-02-14T12:00:00.000000000', '2020-02-14T12:00:01.000000000', '2020-02-14T12:00:02.000000000'], dtype='datetime64[ns]')
- xPosition(timeStamp)float647.279e+05 7.269e+05 ... 6.672e+05
- units :
- m
array([727923.30947263, 726941.64455863, 725958.13683564, 724973.04298486, 723986.16095913, 722997.64220788, 722007.48635449, 721015.54747334, 720022.17643443, 719027.0232458 , 718030.09067721, 717031.37839573, 716031.03774907, 715029.27020538, 714025.57879489, 713020.26184762, 712013.52164005, 711004.861258 , 709994.63157736, 708982.58083196, 707968.96244183, 706954.07610199, 705937.12653251, 704918.61460305, 703898.63562759, 702876.59796516, 701853.29839873, 700828.14310831, 699801.52635021, 698773.0571847 , 697743.12972931, 696711.35163037, 695678.11686643, 694643.53182431, 693606.69894186, 692568.81482401, 691528.88668158, 690487.41201942, 689444.68925865, 688399.92470934, 687353.61892812, 686305.97298534, 685256.38479325, 684205.45972062, 683152.79624267, 682098.50222315, 681042.76772005, 679985.20382296, 678926.1071937 , 677865.47986176, 676803.32307942, 675739.34208841, 674674.12941425, 673607.09431736, 672538.53561574, 671468.45300682, 670396.75341348, 669323.33250832, 668248.39073433, 667171.93167698]) - yPosition(timeStamp)float64-4.59e+06 -4.596e+06 ... -4.919e+06
- units :
- m
array([-4590050.76053492, -4595796.69096692, -4601537.33976971, -4607272.20653086, -4613001.4414 , -4618725.24391992, -4624443.61496387, -4630156.35212007, -4635863.50746889, -4641565.02952279, -4647260.91684301, -4652951.17027059, -4658635.98942621, -4664315.22605111, -4669988.62631062, -4675656.59205696, -4681318.97450602, -4686975.51971469, -4692626.27998742, -4698271.75258578, -4703911.44027417, -4709545.74397367, -4715174.00839712, -4720796.48598445, -4726413.72840058, -4732024.93004653, -4737630.74646207, -4743230.37371314, -4748824.76418523, -4754412.96434803, -4759995.92664488, -4765572.69862616, -4771144.23279265, -4776709.83037195, -4782269.53219045, -4787823.69949293, -4793371.82217743, -4798914.15546998, -4804451.10123265, -4809982.00262607, -4815507.11271239, -4821026.28422674, -4826539.96080751, -4832047.69774999, -4837549.79106517, -4843045.54144243, -4848536.05104385, -4854020.36526055, -4859498.88724383, -4864971.616178 , -4870438.55181537, -4875899.29094726, -4881354.63979461, -4886803.79216617, -4892247.14964126, -4897684.71310792, -4903115.93131872, -4908541.50179648, -4913961.2780503 , -4919375.25813315]) - zPosition(timeStamp)float645.185e+06 5.18e+06 ... 4.883e+06
- units :
- m
array([5185226.88403192, 5180284.8776372 , 5175337.3755486 , 5170382.8787386 , 5165422.88672318, 5160456.39950561, 5155484.41708404, 5150505.9394589 , 5145520.96711287, 5140530.49956141, 5135533.53680638, 5130531.07884592, 5125522.12568331, 5120507.1777989 , 5115486.23470856, 5110459.29641514, 5105426.36339992, 5100387.43517876, 5095342.51223437, 5090291.09360658, 5085234.18025462, 5080170.77218321, 5075101.86890351, 5070026.47090151, 5064945.57769694, 5059858.68928502, 5054765.30615364, 5049666.42829524, 5044561.55523521, 5039450.68744908, 5034333.32446225, 5029210.46674839, 5024081.6138329 , 5018947.2666745 , 5013806.42382842, 5008660.0867423 , 5003507.25444975, 4998348.92743304, 4993184.60569596, 4988014.7887506 , 4982838.47708294, 4977656.67117238, 4972468.86957606, 4967275.07373778, 4962075.282695 , 4956869.49740739, 4951658.21691722, 4946440.94170097, 4941218.17176056, 4935989.40709691, 4930754.64771004, 4925513.89359709, 4920267.64476283, 4915015.90120156, 4909757.66291799, 4904493.92991026, 4899224.70265678, 4893948.98019974, 4888668.26301762, 4883381.05111261]) - xVelocity(timeStamp)float64-980.8 -982.7 ... -1.077e+03
- units :
- m/s
array([ -980.81478756, -982.67609603, -984.23018897, -986.05851557, -987.66657746, -989.33058957, -991.0951305 , -992.50717425, -994.32620822, -996.08453861, -997.89977553, -999.49342342, -1000.92488137, -1002.86515755, -1004.4824983 , -1005.90802614, -1007.84243332, -1009.42447605, -1011.19336614, -1012.80167529, -1014.02628516, -1016.14152845, -1017.68288861, -1019.15234641, -1021.23099567, -1022.44517255, -1024.36084113, -1025.79154078, -1027.67218602, -1029.06765689, -1030.97534028, -1032.39793616, -1033.79120142, -1036.0095479 , -1037.07810339, -1039.10222762, -1040.67729027, -1041.89778706, -1043.97937793, -1045.48438294, -1046.86175378, -1048.77415035, -1050.11512941, -1051.8335701 , -1053.49090369, -1054.91716206, -1056.76009025, -1058.31314014, -1059.83121038, -1061.34721845, -1063.18147764, -1064.40593108, -1066.26934244, -1067.74334426, -1069.28208626, -1070.94950243, -1072.60653393, -1074.17283686, -1075.6357136 , -1077.21112165]) - yVelocity(timeStamp)float64-5.749e+03 ... -5.411e+03
- units :
- m/s
array([-5748.66520635, -5743.54095005, -5737.47322162, -5732.18669317, -5726.49971287, -5721.29672169, -5715.497567 , -5709.73738955, -5704.41660453, -5698.5961932 , -5693.26091964, -5687.52548974, -5681.97694049, -5676.27462521, -5670.76585803, -5665.19672232, -5659.47390336, -5653.79030678, -5648.06181932, -5642.61100456, -5636.86206955, -5631.24910217, -5625.28355647, -5620.06366953, -5614.1816692 , -5608.40072917, -5602.696369 , -5597.20402444, -5591.23781355, -5585.48654428, -5579.75234227, -5574.23553371, -5568.63945201, -5562.50233681, -5557.10147528, -5550.89344106, -5545.32596308, -5539.71511291, -5533.98023491, -5527.89864266, -5522.2474829 , -5516.5138885 , -5510.60154239, -5504.79804875, -5498.65855244, -5493.30327302, -5487.20779737, -5481.56728989, -5475.67228409, -5469.77138021, -5463.64700285, -5458.19727663, -5452.30734908, -5446.13176382, -5440.44558869, -5434.47528888, -5428.33964664, -5422.88148554, -5416.6740862 , -5410.74613856]) - zVelocity(timeStamp)float64-4.939e+03 -4.945e+03 ... -5.29e+03
- units :
- m/s
array([-4938.91501984, -4944.54756856, -4951.29304845, -4957.08992441, -4963.36211057, -4969.05777331, -4975.40761002, -4981.74475018, -4987.51581684, -4993.84650725, -4999.60666674, -5005.83405367, -5011.85879394, -5017.97358935, -5023.90225171, -5029.90955326, -5036.00759237, -5042.09381996, -5048.19126857, -5053.98808636, -5060.15153321, -5066.03395385, -5072.36587521, -5077.87486489, -5084.01528905, -5090.14692844, -5096.08698059, -5101.84687493, -5108.04843252, -5114.06843994, -5119.98563844, -5125.72147191, -5131.53261998, -5137.80303014, -5143.42214337, -5149.76397388, -5155.46700671, -5161.25140249, -5167.03845842, -5173.25870495, -5179.02522429, -5184.79425577, -5190.81424281, -5196.65658633, -5202.84492203, -5208.23019957, -5214.3205213 , -5219.96118289, -5225.8576287 , -5231.74816724, -5237.81246265, -5243.24927749, -5249.04211995, -5255.16570292, -5260.76539776, -5266.62684154, -5272.64332038, -5277.96832163, -5284.05756611, -5289.83404006])
- passDirection :
- Descending
- orbitDataSource :
- Downlinked
- withinOrbitTube :
- True
- orbitDataFileName :
- RCM-1_2020-02-15T12-21-29_003682.DEF_ORBIT
- history :
- annotations
<xarray.DatasetView> Size: 3kB Dimensions: (timeStamp: 60) Coordinates: * timeStamp (timeStamp) datetime64[ns] 480B 2020-02-14T11:59:03 ... 2020-0... Data variables: xPosition (timeStamp) float64 480B 7.279e+05 7.269e+05 ... 6.672e+05 yPosition (timeStamp) float64 480B -4.59e+06 -4.596e+06 ... -4.919e+06 zPosition (timeStamp) float64 480B 5.185e+06 5.18e+06 ... 4.883e+06 xVelocity (timeStamp) float64 480B -980.8 -982.7 ... -1.076e+03 -1.077e+03 yVelocity (timeStamp) float64 480B -5.749e+03 -5.744e+03 ... -5.411e+03 zVelocity (timeStamp) float64 480B -4.939e+03 -4.945e+03 ... -5.29e+03 Attributes: passDirection: Descending orbitDataSource: Downlinked withinOrbitTube: True orbitDataFileName: RCM-1_2020-02-15T12-21-29_003682.DEF_ORBIT history: annotationsorbitInformation- timeStamp: 120
- timeStamp(timeStamp)datetime64[ns]2020-02-14T11:59:01.690000 ... 2...
array(['2020-02-14T11:59:01.690000000', '2020-02-14T11:59:02.190000000', '2020-02-14T11:59:02.690000000', '2020-02-14T11:59:03.190000000', '2020-02-14T11:59:03.690000000', '2020-02-14T11:59:04.190000000', '2020-02-14T11:59:04.690000000', '2020-02-14T11:59:05.190000000', '2020-02-14T11:59:05.690000000', '2020-02-14T11:59:06.190000000', '2020-02-14T11:59:06.690000000', '2020-02-14T11:59:07.190000000', '2020-02-14T11:59:07.690000000', '2020-02-14T11:59:08.190000000', '2020-02-14T11:59:08.690000000', '2020-02-14T11:59:09.190000000', '2020-02-14T11:59:09.690000000', '2020-02-14T11:59:10.190000000', '2020-02-14T11:59:10.690000000', '2020-02-14T11:59:11.190000000', '2020-02-14T11:59:11.690000000', '2020-02-14T11:59:12.190000000', '2020-02-14T11:59:12.690000000', '2020-02-14T11:59:13.190000000', '2020-02-14T11:59:13.690000000', '2020-02-14T11:59:14.190000000', '2020-02-14T11:59:14.690000000', '2020-02-14T11:59:15.190000000', '2020-02-14T11:59:15.690000000', '2020-02-14T11:59:16.190000000', '2020-02-14T11:59:16.690000000', '2020-02-14T11:59:17.190000000', '2020-02-14T11:59:17.690000000', '2020-02-14T11:59:18.190000000', '2020-02-14T11:59:18.690000000', '2020-02-14T11:59:19.190000000', '2020-02-14T11:59:19.690000000', '2020-02-14T11:59:20.190000000', '2020-02-14T11:59:20.690000000', '2020-02-14T11:59:21.190000000', '2020-02-14T11:59:21.690000000', '2020-02-14T11:59:22.190000000', '2020-02-14T11:59:22.690000000', '2020-02-14T11:59:23.190000000', '2020-02-14T11:59:23.690000000', '2020-02-14T11:59:24.190000000', '2020-02-14T11:59:24.690000000', '2020-02-14T11:59:25.190000000', '2020-02-14T11:59:25.690000000', '2020-02-14T11:59:26.190000000', '2020-02-14T11:59:26.690000000', '2020-02-14T11:59:27.190000000', '2020-02-14T11:59:27.690000000', '2020-02-14T11:59:28.190000000', '2020-02-14T11:59:28.690000000', '2020-02-14T11:59:29.190000000', '2020-02-14T11:59:29.690000000', '2020-02-14T11:59:30.190000000', '2020-02-14T11:59:30.690000000', '2020-02-14T11:59:31.190000000', '2020-02-14T11:59:31.690000000', '2020-02-14T11:59:32.190000000', '2020-02-14T11:59:32.690000000', '2020-02-14T11:59:33.190000000', '2020-02-14T11:59:33.690000000', '2020-02-14T11:59:34.190000000', '2020-02-14T11:59:34.690000000', '2020-02-14T11:59:35.190000000', '2020-02-14T11:59:35.690000000', '2020-02-14T11:59:36.190000000', '2020-02-14T11:59:36.690000000', '2020-02-14T11:59:37.190000000', '2020-02-14T11:59:37.690000000', '2020-02-14T11:59:38.190000000', '2020-02-14T11:59:38.690000000', '2020-02-14T11:59:39.190000000', '2020-02-14T11:59:39.690000000', '2020-02-14T11:59:40.190000000', '2020-02-14T11:59:40.690000000', '2020-02-14T11:59:41.190000000', '2020-02-14T11:59:41.690000000', '2020-02-14T11:59:42.190000000', '2020-02-14T11:59:42.690000000', '2020-02-14T11:59:43.190000000', '2020-02-14T11:59:43.690000000', '2020-02-14T11:59:44.190000000', '2020-02-14T11:59:44.690000000', '2020-02-14T11:59:45.190000000', '2020-02-14T11:59:45.690000000', '2020-02-14T11:59:46.190000000', '2020-02-14T11:59:46.690000000', '2020-02-14T11:59:47.190000000', '2020-02-14T11:59:47.690000000', '2020-02-14T11:59:48.190000000', '2020-02-14T11:59:48.690000000', '2020-02-14T11:59:49.190000000', '2020-02-14T11:59:49.690000000', '2020-02-14T11:59:50.190000000', '2020-02-14T11:59:50.690000000', '2020-02-14T11:59:51.190000000', '2020-02-14T11:59:51.690000000', '2020-02-14T11:59:52.190000000', '2020-02-14T11:59:52.690000000', '2020-02-14T11:59:53.190000000', '2020-02-14T11:59:53.690000000', '2020-02-14T11:59:54.190000000', '2020-02-14T11:59:54.690000000', '2020-02-14T11:59:55.190000000', '2020-02-14T11:59:55.690000000', '2020-02-14T11:59:56.190000000', '2020-02-14T11:59:56.690000000', '2020-02-14T11:59:57.190000000', '2020-02-14T11:59:57.690000000', '2020-02-14T11:59:58.190000000', '2020-02-14T11:59:58.690000000', '2020-02-14T11:59:59.190000000', '2020-02-14T11:59:59.690000000', '2020-02-14T12:00:00.190000000', '2020-02-14T12:00:00.690000000', '2020-02-14T12:00:01.190000000'], dtype='datetime64[ns]')
- yaw(timeStamp)float642.483 2.481 2.48 ... 2.651 2.653
- units :
- deg
array([2.4825742 , 2.48076069, 2.47957233, 2.47918297, 2.47975327, 2.48161448, 2.48409982, 2.48553164, 2.48621905, 2.48761305, 2.48951223, 2.49111127, 2.49264069, 2.49375886, 2.49506363, 2.49739242, 2.50014227, 2.5016668 , 2.50254504, 2.50373631, 2.50510565, 2.50610786, 2.50682039, 2.5081493 , 2.51005985, 2.51244751, 2.51494673, 2.51614271, 2.51672125, 2.51772594, 2.51939424, 2.52170564, 2.52403599, 2.52510445, 2.52572301, 2.52719287, 2.52895023, 2.53028011, 2.53141021, 2.53244571, 2.53410439, 2.53723036, 2.54050134, 2.54114224, 2.54078346, 2.54201744, 2.54389774, 2.54634651, 2.54826042, 2.54847458, 2.54858755, 2.55081834, 2.55405184, 2.55535971, 2.5557725 , 2.55742905, 2.55959258, 2.56069495, 2.56143046, 2.56345446, 2.56586994, 2.56685948, 2.56731293, 2.56876086, 2.57081214, 2.57343256, 2.57573582, 2.57576605, 2.57538475, 2.57748822, 2.58094005, 2.58235261, 2.58270052, 2.58339182, 2.58499564, 2.58783467, 2.59058896, 2.59143445, 2.59099117, 2.59211523, 2.59399716, 2.59654733, 2.59890772, 2.59966223, 2.59983964, 2.60160872, 2.60405772, 2.60582544, 2.60685566, 2.60815537, 2.60964036, 2.61145769, 2.61342557, 2.61448282, 2.61521078, 2.6162366 , 2.61772419, 2.61952165, 2.62128633, 2.62320189, 2.62493513, 2.62589379, 2.62652385, 2.62860523, 2.63131818, 2.63234399, 2.63291775, 2.63432358, 2.63623493, 2.63802177, 2.63946957, 2.64074454, 2.64199083, 2.64321214, 2.64440754, 2.64563327, 2.64686005, 2.64863706, 2.65078186, 2.65265346]) - roll(timeStamp)float64-33.1 -33.1 -33.1 ... -33.1 -33.1
- units :
- deg
array([-33.09609606, -33.09616174, -33.09622792, -33.09610613, -33.09625851, -33.0962878 , -33.09613316, -33.09626265, -33.09613897, -33.09621064, -33.09624534, -33.09616496, -33.09624974, -33.0963313 , -33.09636896, -33.09629866, -33.09624919, -33.0961742 , -33.09621848, -33.09604786, -33.09614875, -33.09610405, -33.09609151, -33.09631778, -33.09615188, -33.09611575, -33.09618605, -33.096119 , -33.09611181, -33.0961629 , -33.09615362, -33.09623436, -33.09617051, -33.09621801, -33.09615027, -33.09626088, -33.09630227, -33.09617142, -33.09612745, -33.09616667, -33.09616736, -33.09606045, -33.09609698, -33.09619198, -33.09598391, -33.09599604, -33.09607972, -33.09607433, -33.09616747, -33.09599338, -33.09630533, -33.0961322 , -33.0961748 , -33.09612161, -33.09613107, -33.09623534, -33.09627958, -33.09613671, -33.09615388, -33.09614075, -33.09610117, -33.09600658, -33.09606108, -33.09608258, -33.0961077 , -33.09603352, -33.09603575, -33.09597008, -33.09598234, -33.09602739, -33.09587276, -33.09598408, -33.09614216, -33.09616246, -33.09614694, -33.09614666, -33.09617555, -33.09624351, -33.09613749, -33.09620345, -33.09609662, -33.09606849, -33.09601343, -33.09609238, -33.09598559, -33.09601857, -33.09596181, -33.09603454, -33.09600685, -33.09615954, -33.09601532, -33.09603106, -33.09612295, -33.09603647, -33.09615713, -33.09603604, -33.09610022, -33.09601869, -33.0959568 , -33.09587191, -33.09603636, -33.09599721, -33.09601629, -33.09590475, -33.09585318, -33.09591727, -33.0960069 , -33.09609166, -33.09619725, -33.09618534, -33.09616728, -33.09616386, -33.09601483, -33.09606245, -33.09610963, -33.09601805, -33.0959243 , -33.09594704, -33.09598434, -33.09587863]) - pitch(timeStamp)float640.03679 0.0368 ... 0.0394 0.03931
- units :
- deg
array([0.03679362, 0.03680441, 0.03679661, 0.03684141, 0.0368976 , 0.03681612, 0.03675182, 0.03691876, 0.03688179, 0.03699707, 0.03685591, 0.03687528, 0.03693445, 0.03693339, 0.03696795, 0.03691544, 0.03717547, 0.03708701, 0.03716424, 0.03723782, 0.03720752, 0.03715445, 0.03724608, 0.03718169, 0.03732718, 0.03730976, 0.03720791, 0.03740682, 0.03745385, 0.03738031, 0.03738323, 0.03732924, 0.03741362, 0.03741069, 0.03732956, 0.03741073, 0.03755821, 0.03748178, 0.03754432, 0.03777073, 0.03748692, 0.03768606, 0.03770913, 0.03770331, 0.03779442, 0.03783734, 0.03790894, 0.0378273 , 0.03775331, 0.03794632, 0.03790555, 0.03771848, 0.03784641, 0.03785708, 0.0378396 , 0.03801013, 0.03795766, 0.03790579, 0.0379796 , 0.03783509, 0.03788714, 0.03809063, 0.0381857 , 0.03819755, 0.03839195, 0.03841299, 0.03840452, 0.03840418, 0.03829848, 0.03833389, 0.03829368, 0.03823714, 0.03820326, 0.03819795, 0.03820528, 0.03817389, 0.03840712, 0.03834946, 0.03860235, 0.03848722, 0.03844962, 0.03861047, 0.03868924, 0.03865648, 0.03875321, 0.03864087, 0.03870068, 0.03861441, 0.03881339, 0.03852714, 0.0386664 , 0.03866511, 0.03869844, 0.03867147, 0.03880164, 0.03882205, 0.03882651, 0.03884828, 0.03890649, 0.03897195, 0.03904818, 0.0391383 , 0.0391245 , 0.03918455, 0.03900077, 0.03911474, 0.03902422, 0.03916339, 0.03906923, 0.03916618, 0.03914283, 0.03910461, 0.03914048, 0.03917898, 0.03912948, 0.03931096, 0.03933284, 0.03940048, 0.03939982, 0.03931393])
- attitudeDataSource :
- Downlink
- attitudeOffsetsApplied :
- True
<xarray.DatasetView> Size: 4kB Dimensions: (timeStamp: 120) Coordinates: * timeStamp (timeStamp) datetime64[ns] 960B 2020-02-14T11:59:01.690000 ...... Data variables: yaw (timeStamp) float64 960B 2.483 2.481 2.48 ... 2.649 2.651 2.653 roll (timeStamp) float64 960B -33.1 -33.1 -33.1 ... -33.1 -33.1 -33.1 pitch (timeStamp) float64 960B 0.03679 0.0368 0.0368 ... 0.0394 0.03931 Attributes: attitudeDataSource: Downlink attitudeOffsetsApplied: TrueattitudeInformation
<xarray.DatasetView> Size: 0B Dimensions: () Data variables: *empty*orbitAndAttitude- pole: 2
- beam: 8
- histogram: 1467
- pole(pole)<U2'HH' 'HV'
array(['HH', 'HV'], dtype='<U2')
- beam(beam)<U5'SC-10' 'SC-3' ... 'SC-8' 'SC-9'
array(['SC-10', 'SC-3', 'SC-4', 'SC-5', 'SC-6', 'SC-7', 'SC-8', 'SC-9'], dtype='<U5')
- numberOfMissingLines(pole)int640 0
array([0, 0])
- bias(pole, beam)complex128(-0.008008179254829884+0.0346506...
array([[-0.00800818+0.03465065j, -0.03131863+0.01901898j, -0.00115704+0.03699617j, -0.03470577-0.00050093j, -0.0178196 -0.00101219j, -0.02243368+0.02061179j, -0.02645879+0.00732895j, 0.0091192 +0.02533829j], [-0.04086595-0.10393665j, -0.03829988-0.10074355j, -0.02957907-0.09534553j, -0.0405474 -0.09852054j, -0.03352569-0.09995616j, -0.03778108-0.09217259j, -0.03086755-0.09578045j, -0.03091986-0.09191641j]]) - standardDeviation(pole, beam)complex128(23.67938423156738+23.7111988067...
array([[23.67938423+23.71119881j, 47.7175827 +47.77791595j, 38.79421234+38.8890686j , 29.29199791+29.31474686j, 27.56559944+27.58312798j, 21.04188538+21.06681252j, 28.02896881+28.09051132j, 23.13762474+23.18834496j], [ 9.73390675 +9.76785946j, 15.96218491+16.00499916j, 13.87858677+13.92871952j, 10.78365517+10.80482483j, 10.46121502+10.4909029j , 8.42882538 +8.45581245j, 11.38443661+11.40744972j, 9.51571941 +9.54342937j]]) - gainImbalance(pole, beam)float640.9987 0.9987 ... 0.998 0.9971
array([[0.99865824, 0.99873722, 0.99756086, 0.99922395, 0.9993645 , 0.99881673, 0.99780911, 0.99781269], [0.99652404, 0.99732494, 0.99640077, 0.99804074, 0.99717015, 0.99680847, 0.99798262, 0.99709642]]) - phaseOrthogonality(pole, beam)float64-0.07973 -0.09921 ... -0.08485
- units :
- deg
array([[-0.07972926, -0.09921373, -0.08881833, -0.1901958 , -0.10420529, -0.04352544, -0.16050535, -0.12335774], [-0.01482264, -0.0282644 , -0.03435602, -0.14133196, -0.12533182, -0.1033835 , 0.01185991, -0.08484855]]) - rawDataHistogram(histogram, pole, beam)complex1280j 0j 0j 0j 0j ... 0j 0j 0j 0j 0j
array([[[0.+0.j, 0.+0.j, 0.+0.j, ..., 0.+0.j, 0.+0.j, 0.+0.j], [0.+0.j, 0.+0.j, 0.+0.j, ..., 0.+0.j, 0.+0.j, 0.+0.j]], [[0.+0.j, 0.+0.j, 0.+0.j, ..., 0.+0.j, 0.+0.j, 0.+0.j], [0.+0.j, 0.+0.j, 0.+0.j, ..., 0.+0.j, 0.+0.j, 0.+0.j]], [[0.+0.j, 0.+0.j, 0.+0.j, ..., 0.+0.j, 0.+0.j, 0.+0.j], [0.+0.j, 0.+0.j, 0.+0.j, ..., 0.+0.j, 0.+0.j, 0.+0.j]], ..., [[0.+0.j, 0.+0.j, 0.+0.j, ..., 0.+0.j, 0.+0.j, 0.+0.j], [0.+0.j, 0.+0.j, 0.+0.j, ..., 0.+0.j, 0.+0.j, 0.+0.j]], [[0.+0.j, 0.+0.j, 0.+0.j, ..., 0.+0.j, 0.+0.j, 0.+0.j], [0.+0.j, 0.+0.j, 0.+0.j, ..., 0.+0.j, 0.+0.j, 0.+0.j]], [[0.+0.j, 0.+0.j, 0.+0.j, ..., 0.+0.j, 0.+0.j, 0.+0.j], [0.+0.j, 0.+0.j, 0.+0.j, ..., 0.+0.j, 0.+0.j, 0.+0.j]]])
- numberOfInputDataGaps :
- 0
- gapSize :
- 100
<xarray.DatasetView> Size: 377kB Dimensions: (pole: 2, beam: 8, histogram: 1467) Coordinates: * pole (pole) <U2 16B 'HH' 'HV' * beam (beam) <U5 160B 'SC-10' 'SC-3' ... 'SC-8' 'SC-9' Dimensions without coordinates: histogram Data variables: numberOfMissingLines (pole) int64 16B 0 0 bias (pole, beam) complex128 256B (-0.008008179254829884... standardDeviation (pole, beam) complex128 256B (23.67938423156738+23.... gainImbalance (pole, beam) float64 128B 0.9987 0.9987 ... 0.9971 phaseOrthogonality (pole, beam) float64 128B -0.07973 ... -0.08485 rawDataHistogram (histogram, pole, beam) complex128 376kB 0j 0j ... 0j Attributes: numberOfInputDataGaps: 0 gapSize: 100rawDataAttributes- satellite :
- RCM-1
- sensor :
- SAR
- polarizationDataMode :
- Dual Co/Cross
- downlinkSegmentId :
- 133105_150136
- inputDatasetFacilityId :
- GATN
- beamMode :
- Medium Resolution 50m
- beamModeDefinitionId :
- 22
- beamModeVersion :
- 1
- beamModeMnemonic :
- SC50MB
- rawDataStartTime :
- 2020-02-14T11:59:05.845000Z
<xarray.DatasetView> Size: 0B Dimensions: () Data variables: *empty* Attributes: satellite: RCM-1 sensor: SAR polarizationDataMode: Dual Co/Cross downlinkSegmentId: 133105_150136 inputDatasetFacilityId: GATN beamMode: Medium Resolution 50m beamModeDefinitionId: 22 beamModeVersion: 1 beamModeMnemonic: SC50MB rawDataStartTime: 2020-02-14T11:59:05.845000ZsourceAttributes- productType :
- GRD
- processingFacility :
- SHUB
- processingTime :
- 2020-02-17T19:52:32.000000Z
- softwareVersion :
- RCM PGS 6.25
- processingMode :
- Standard
- processingPriority :
- Low
<xarray.DatasetView> Size: 0B Dimensions: () Data variables: *empty* Attributes: productType: GRD processingFacility: SHUB processingTime: 2020-02-17T19:52:32.000000Z softwareVersion: RCM PGS 6.25 processingMode: Standard processingPriority: LowgeneralProcessingInformation- pole: 2
- beam: 8
- pole(pole)<U2'HH' 'HV'
array(['HH', 'HV'], dtype='<U2')
- beam(beam)<U5'SC-3' 'SC-4' ... 'SC-9' 'SC-10'
array(['SC-3', 'SC-4', 'SC-5', 'SC-6', 'SC-7', 'SC-8', 'SC-9', 'SC-10'], dtype='<U5')
- atmosphericPropagationDelay()float640.0
- units :
- us
array(0.)
- numberOfLinesProcessed(pole)int64136673 136673
array([136673, 136673])
- rangeLookBandwidth()float648.065e+06
- units :
- Hz
array(8064516.12903226)
- totalProcessedRangeBandwidth()float642.5e+07
- units :
- Hz
array(25000000.)
- perBeamNumberOfRangeLooks(beam)int644 4 4 4 4 4 4 4
array([4, 4, 4, 4, 4, 4, 4, 4])
- perBeamRangeLookBandwidths(beam)float648.065e+06 7.097e+06 ... 4.839e+06
- units :
- Hz
array([8064516.12903226, 7096774.19354839, 6129032.25806452, 5645161.29032258, 5645161.29032258, 5161290.32258064, 4838709.67741936, 4838709.67741936]) - perBeamTotalProcessedRangeBandwidths(beam)float648.065e+06 7.097e+06 ... 4.839e+06
- units :
- Hz
array([8064516.12903226, 7096774.19354839, 6129032.25806452, 5645161.29032258, 5645161.29032258, 5161290.32258064, 4838709.67741936, 4838709.67741936]) - azimuthLookBandwidth(beam)float64162.6 162.3 162.5 ... 161.3 161.7
- units :
- Hz
array([162.55053665, 162.25296746, 162.47780674, 161.36839582, 162.33496112, 161.90828836, 161.25816358, 161.72356613]) - totalProcessedAzimuthBandwidth(beam)float64162.6 162.3 162.5 ... 161.3 161.7
- units :
- Hz
array([162.55053665, 162.25296746, 162.47780674, 161.36839582, 162.33496112, 161.90828836, 161.25816358, 161.72356613]) - satelliteHeight()float645.965e+05
- units :
- m
array(596462.6330914)
- lutApplied :
- Ice
- perPolarizationScaling :
- False
- atmosphericCorrection :
- False
- elevationPatternCorrection :
- True
- rangeSpreadingLossCorrection :
- True
- pulseDependentGainCorrection :
- True
- noiseSubtractionPerformed :
- False
- receiverSettableGainCorrection :
- True
- rawDataCorrection :
- True
- bistaticCorrectionApplied :
- True
- rangeReferenceFunctionSource :
- Nominal Chirp
- dopplerSource :
- Adaptive Analysis
- estimatedRollAngleUsed :
- False
- radiometricSmoothingPerformed :
- True
- zeroDopplerTimeFirstLine :
- 2020-02-14T11:59:05.340390Z
- zeroDopplerTimeLastLine :
- 2020-02-14T12:00:00.709127Z
- numberOfRangeLooks :
- 4
- perBeamNumberOfRangeLooksUsed :
- True
- numberOfAzimuthLooks :
- 1
<xarray.DatasetView> Size: 544B Dimensions: (pole: 2, beam: 8) Coordinates: * pole (pole) <U2 16B 'HH' 'HV' * beam (beam) <U5 160B 'SC-3' ... 'SC-10' Data variables: atmosphericPropagationDelay float64 8B 0.0 numberOfLinesProcessed (pole) int64 16B 136673 136673 rangeLookBandwidth float64 8B 8.065e+06 totalProcessedRangeBandwidth float64 8B 2.5e+07 perBeamNumberOfRangeLooks (beam) int64 64B 4 4 4 4 4 4 4 4 perBeamRangeLookBandwidths (beam) float64 64B 8.065e+06 ... 4.... perBeamTotalProcessedRangeBandwidths (beam) float64 64B 8.065e+06 ... 4.... azimuthLookBandwidth (beam) float64 64B 162.6 ... 161.7 totalProcessedAzimuthBandwidth (beam) float64 64B 162.6 ... 161.7 satelliteHeight float64 8B 5.965e+05 Attributes: (12/19) lutApplied: Ice perPolarizationScaling: False atmosphericCorrection: False elevationPatternCorrection: True rangeSpreadingLossCorrection: True pulseDependentGainCorrection: True ... ... radiometricSmoothingPerformed: True zeroDopplerTimeFirstLine: 2020-02-14T11:59:05.340390Z zeroDopplerTimeLastLine: 2020-02-14T12:00:00.709127Z numberOfRangeLooks: 4 perBeamNumberOfRangeLooksUsed: True numberOfAzimuthLooks: 1sarProcessingInformation- pole: 2
- pulse: 7
- coefficients: 4
- pole(pole)<U2'HH' 'HV'
array(['HH', 'HV'], dtype='<U2')
- pulse(pulse)<U2'25' '27' '28' '29' '32' '34' '35'
array(['25', '27', '28', '29', '32', '34', '35'], dtype='<U2')
- chirpPower(pole, pulse)float64124.3 121.7 120.8 ... 120.7 119.1
- units :
- dB
array([[124.31692423, 121.71113126, 120.78993526, 121.00481844, 120.75358809, 120.09343596, 118.50972744], [124.88071716, 122.27784137, 121.35079997, 121.55517552, 121.30470254, 120.65599447, 119.07622605]]) - amplitudeCoefficients(coefficients, pole, pulse)float641.0 1.0 1.0 ... 5.908e+11 1.162e+12
array([[[ 1.00000000e+00, 9.99999940e-01, 1.00000000e+00, 1.00000000e+00, 1.00000000e+00, 1.00000000e+00, 1.00000000e+00], [ 9.99999940e-01, 1.00000000e+00, 1.00000000e+00, 1.00000000e+00, 1.00000000e+00, 1.00000000e+00, 1.00000000e+00]], [[ 2.35746574e+01, 9.28031063e+00, -1.09472786e+02, -4.65980492e+01, -1.41407455e+02, -1.34874374e+02, -1.44432556e+02], [ 2.43069820e+01, 8.70788574e+01, 2.69726849e+01, -1.80289478e+01, -1.23713913e+02, -1.57395935e+02, -1.01592735e+02]], [[-5.87182750e+05, 3.78516172e+04, 8.91118375e+05, 1.64202400e+06, 5.32206400e+06, 9.38869900e+06, 1.87279540e+07], [ 1.03203340e+07, 1.04639250e+07, 1.64016620e+07, 8.29220200e+06, 1.35642510e+07, 2.89016340e+07, 3.10712860e+07]], [[ 4.73128108e+11, 9.30165424e+11, 1.56489784e+12, 2.97620963e+11, 5.19305658e+11, 5.12749994e+11, 1.35676284e+12], [ 5.83621476e+11, 6.76090020e+11, 9.43358411e+11, 1.06878370e+11, 4.81406157e+11, 5.90788231e+11, 1.16246000e+12]]]) - phaseCoefficients(coefficients, pole, pulse)float640.385 0.7922 ... 1.708e+12
array([[[ 3.85014415e-01, 7.92232871e-01, 3.26141983e-01, 5.22548258e-01, 1.03366897e-01, 5.16008258e-01, 3.84750180e-02], [ 4.62241083e-01, 8.69483829e-01, 4.03388083e-01, 5.99935234e-01, 1.80389583e-01, 5.93171775e-01, 1.15691975e-01]], [[ 2.07816562e+05, 1.82225984e+05, 1.31055594e+05, 7.42107734e+04, 4.25827930e+04, 1.28082539e+04, 1.15338623e+04], [ 2.07726062e+05, 1.82123812e+05, 1.30968398e+05, 7.41308359e+04, 4.25146445e+04, 1.27565078e+04, 1.14659863e+04]], [[-3.54180956e+11, -3.74029320e+11, -3.23014754e+11, -2.62515622e+11, -2.26679308e+11, -2.12517388e+11, -2.55021892e+11], [-3.54180923e+11, -3.74029320e+11, -3.23014459e+11, -2.62515507e+11, -2.26678833e+11, -2.12517093e+11, -2.55021564e+11]], [[ 1.14992139e+12, 5.99003955e+11, 8.10924638e+11, 7.30079494e+11, 2.69475463e+11, 6.64492442e+10, 1.65658925e+12], [ 1.27413440e+12, 8.36532896e+11, 9.74564098e+11, 8.55384261e+11, 3.59849755e+11, 1.00224164e+11, 1.70776461e+12]]]) - replicaQualityValid(pole, pulse)boolTrue True True ... True True True
array([[ True, True, True, True, True, True, True], [ True, True, True, True, True, True, True]]) - crossCorrelationWidth(pole, pulse)float640.9375 0.9475 ... 0.9625 0.9632
array([[0.93751526, 0.9475441 , 0.98721123, 0.97546387, 0.97758865, 0.96277237, 0.96326065], [0.93716431, 0.94730568, 0.98684311, 0.97510147, 0.97732544, 0.96245766, 0.9631691 ]]) - sideLobeLevel(pole, pulse)float64-13.17 -13.23 ... -13.09 -13.17
- units :
- dB
array([[-13.16657352, -13.22963619, -13.22489929, -13.23089695, -13.20590878, -13.12987518, -13.20016193], [-13.13167286, -13.20008755, -13.18969345, -13.20178318, -13.1806078 , -13.09494019, -13.17325592]]) - integratedSideLobeRatio(pole, pulse)float64-11.15 -11.17 ... -11.12 -11.12
- units :
- dB
array([[-11.15097046, -11.1659317 , -11.19141006, -11.14718437, -11.15387821, -11.13457489, -11.12428093], [-11.13533783, -11.15543938, -11.17501354, -11.13161182, -11.14039803, -11.12054157, -11.11644077]]) - crossCorrelationPeakLoc(pole, pulse)float6435.14 29.98 25.86 ... 17.3 17.3
array([[35.140625, 29.984375, 25.859375, 22.5 , 19.6875 , 17.296875, 17.296875], [35.140625, 29.984375, 25.859375, 22.484375, 19.6875 , 17.296875, 17.296875]])
<xarray.DatasetView> Size: 2kB Dimensions: (pole: 2, pulse: 7, coefficients: 4) Coordinates: * pole (pole) <U2 16B 'HH' 'HV' * pulse (pulse) <U2 56B '25' '27' '28' '29' '32' '34' '35' Dimensions without coordinates: coefficients Data variables: chirpPower (pole, pulse) float64 112B 124.3 121.7 ... 119.1 amplitudeCoefficients (coefficients, pole, pulse) float64 448B 1.0 ...... phaseCoefficients (coefficients, pole, pulse) float64 448B 0.385 .... replicaQualityValid (pole, pulse) bool 14B True True True ... True True crossCorrelationWidth (pole, pulse) float64 112B 0.9375 0.9475 ... 0.9632 sideLobeLevel (pole, pulse) float64 112B -13.17 -13.23 ... -13.17 integratedSideLobeRatio (pole, pulse) float64 112B -11.15 -11.17 ... -11.12 crossCorrelationPeakLoc (pole, pulse) float64 112B 35.14 29.98 ... 17.3chirps- zeroDopplerAzimuthTime: 278
- coefficients: 13
- zeroDopplerAzimuthTime(zeroDopplerAzimuthTime)<U27'2020-02-14T11:59:05.340390Z' .....
array(['2020-02-14T11:59:05.340390Z', '2020-02-14T11:59:05.540277Z', '2020-02-14T11:59:05.740164Z', ..., '2020-02-14T12:00:00.309353Z', '2020-02-14T12:00:00.509240Z', '2020-02-14T12:00:00.709127Z'], dtype='<U27')
- slantRangeTimeToFirstRangeSample(zeroDopplerAzimuthTime)float640.004411 0.004411 ... 0.004411
- units :
- s
array([0.00441135, 0.00441135, 0.00441135, 0.00441135, 0.00441135, 0.00441135, 0.00441135, 0.00441135, 0.00441135, 0.00441135, 0.00441135, 0.00441135, 0.00441135, 0.00441135, 0.00441135, 0.00441135, 0.00441135, 0.00441135, 0.00441135, 0.00441135, 0.00441135, 0.00441135, 0.00441135, 0.00441135, 0.00441135, 0.00441135, 0.00441135, 0.00441135, 0.00441135, 0.00441135, 0.00441135, 0.00441135, 0.00441135, 0.00441135, 0.00441135, 0.00441135, 0.00441135, 0.00441135, 0.00441135, 0.00441135, 0.00441135, 0.00441135, 0.00441135, 0.00441135, 0.00441135, 0.00441135, 0.00441135, 0.00441135, 0.00441135, 0.00441135, 0.00441135, 0.00441135, 0.00441135, 0.00441135, 0.00441135, 0.00441135, 0.00441135, 0.00441135, 0.00441135, 0.00441135, 0.00441135, 0.00441135, 0.00441135, 0.00441135, 0.00441135, 0.00441135, 0.00441135, 0.00441135, 0.00441135, 0.00441135, 0.00441135, 0.00441135, 0.00441135, 0.00441135, 0.00441135, 0.00441135, 0.00441135, 0.00441135, 0.00441135, 0.00441135, 0.00441135, 0.00441135, 0.00441135, 0.00441135, 0.00441135, 0.00441135, 0.00441135, 0.00441135, 0.00441135, 0.00441135, 0.00441135, 0.00441135, 0.00441135, 0.00441135, 0.00441135, 0.00441135, 0.00441135, 0.00441135, 0.00441135, 0.00441135, ... 0.00441135, 0.00441135, 0.00441135, 0.00441135, 0.00441135, 0.00441135, 0.00441135, 0.00441135, 0.00441135, 0.00441135, 0.00441135, 0.00441135, 0.00441135, 0.00441135, 0.00441135, 0.00441135, 0.00441135, 0.00441135, 0.00441135, 0.00441135, 0.00441135, 0.00441135, 0.00441135, 0.00441135, 0.00441135, 0.00441135, 0.00441135, 0.00441135, 0.00441135, 0.00441135, 0.00441135, 0.00441135, 0.00441135, 0.00441135, 0.00441135, 0.00441135, 0.00441135, 0.00441135, 0.00441135, 0.00441135, 0.00441135, 0.00441135, 0.00441135, 0.00441135, 0.00441135, 0.00441135, 0.00441135, 0.00441135, 0.00441135, 0.00441135, 0.00441135, 0.00441135, 0.00441135, 0.00441135, 0.00441135, 0.00441135, 0.00441135, 0.00441135, 0.00441135, 0.00441135, 0.00441135, 0.00441135, 0.00441135, 0.00441135, 0.00441135, 0.00441135, 0.00441135, 0.00441135, 0.00441135, 0.00441135, 0.00441135, 0.00441135, 0.00441135, 0.00441135, 0.00441135, 0.00441135, 0.00441135, 0.00441135, 0.00441135, 0.00441135, 0.00441135, 0.00441135, 0.00441135, 0.00441135, 0.00441135, 0.00441135, 0.00441135, 0.00441135, 0.00441135, 0.00441135, 0.00441135, 0.00441135, 0.00441135, 0.00441135, 0.00441135, 0.00441135, 0.00441135, 0.00441135]) - groundRangeOrigin(zeroDopplerAzimuthTime)float640.0 0.0 0.0 0.0 ... 0.0 0.0 0.0 0.0
- units :
- m
array([0., 0., 0., 0., 0., 0., 0., 0., 0., 0., 0., 0., 0., 0., 0., 0., 0., 0., 0., 0., 0., 0., 0., 0., 0., 0., 0., 0., 0., 0., 0., 0., 0., 0., 0., 0., 0., 0., 0., 0., 0., 0., 0., 0., 0., 0., 0., 0., 0., 0., 0., 0., 0., 0., 0., 0., 0., 0., 0., 0., 0., 0., 0., 0., 0., 0., 0., 0., 0., 0., 0., 0., 0., 0., 0., 0., 0., 0., 0., 0., 0., 0., 0., 0., 0., 0., 0., 0., 0., 0., 0., 0., 0., 0., 0., 0., 0., 0., 0., 0., 0., 0., 0., 0., 0., 0., 0., 0., 0., 0., 0., 0., 0., 0., 0., 0., 0., 0., 0., 0., 0., 0., 0., 0., 0., 0., 0., 0., 0., 0., 0., 0., 0., 0., 0., 0., 0., 0., 0., 0., 0., 0., 0., 0., 0., 0., 0., 0., 0., 0., 0., 0., 0., 0., 0., 0., 0., 0., 0., 0., 0., 0., 0., 0., 0., 0., 0., 0., 0., 0., 0., 0., 0., 0., 0., 0., 0., 0., 0., 0., 0., 0., 0., 0., 0., 0., 0., 0., 0., 0., 0., 0., 0., 0., 0., 0., 0., 0., 0., 0., 0., 0., 0., 0., 0., 0., 0., 0., 0., 0., 0., 0., 0., 0., 0., 0., 0., 0., 0., 0., 0., 0., 0., 0., 0., 0., 0., 0., 0., 0., 0., 0., 0., 0., 0., 0., 0., 0., 0., 0., 0., 0., 0., 0., 0., 0., 0., 0., 0., 0., 0., 0., 0., 0., 0., 0., 0., 0., 0., 0., 0., 0., 0., 0., 0., 0., 0., 0., 0., 0., 0., 0., 0., 0., 0., 0., 0., 0.]) - groundToSlantRangeCoefficients(zeroDopplerAzimuthTime, coefficients)float646.612e+05 0.4508 ... -8.253e-67
array([[ 6.61244219e+05, 4.50807636e-01, 6.72328152e-07, ..., 1.56573612e-54, -8.77878099e-61, 2.67197890e-67], [ 6.61244219e+05, 4.50816410e-01, 6.72321817e-07, ..., 3.60147460e-56, 6.99533930e-61, -4.45377274e-67], [ 6.61244219e+05, 4.50825183e-01, 6.72315632e-07, ..., 2.48295440e-54, -1.84362413e-60, 7.12679590e-67], ..., [ 6.61244219e+05, 4.53195935e-01, 6.70615303e-07, ..., 1.69951547e-54, -1.05860162e-60, 3.66742712e-67], [ 6.61244219e+05, 4.53204502e-01, 6.70609142e-07, ..., 1.02046945e-54, -3.01143157e-61, 0.00000000e+00], [ 6.61244219e+05, 4.53213070e-01, 6.70602920e-07, ..., -6.96341183e-55, 1.49717905e-60, -8.25342613e-67]])
<xarray.DatasetView> Size: 63kB Dimensions: (zeroDopplerAzimuthTime: 278, coefficients: 13) Coordinates: * zeroDopplerAzimuthTime (zeroDopplerAzimuthTime) <U27 30kB '202... Dimensions without coordinates: coefficients Data variables: slantRangeTimeToFirstRangeSample (zeroDopplerAzimuthTime) float64 2kB 0.... groundRangeOrigin (zeroDopplerAzimuthTime) float64 2kB 0.... groundToSlantRangeCoefficients (zeroDopplerAzimuthTime, coefficients) float64 29kB ...slantRangeToGroundRange
<xarray.DatasetView> Size: 0B Dimensions: () Data variables: *empty*imageGenerationParameters- bitsPerSample()int6416
- type :
- magnitude
array(16)
- sampledPixelSpacing()float6420.0
- units :
- m
array(20.)
- sampledLineSpacing()float6420.0
- units :
- m
array(20.)
- sampledPixelSpacingTime()float641.334e-07
- units :
- s
array(1.33425638e-07)
- sampledLineSpacingTime()float640.002895
- units :
- s
array(0.00289519)
- sampleType :
- Magnitude Detected
- dataType :
- Integer
- lineTimeOrdering :
- Increasing
- pixelTimeOrdering :
- Decreasing
<xarray.DatasetView> Size: 40B Dimensions: () Data variables: bitsPerSample int64 8B 16 sampledPixelSpacing float64 8B 20.0 sampledLineSpacing float64 8B 20.0 sampledPixelSpacingTime float64 8B 1.334e-07 sampledLineSpacingTime float64 8B 0.002895 Attributes: sampleType: Magnitude Detected dataType: Integer lineTimeOrdering: Increasing pixelTimeOrdering: DecreasingrasterAttributes- params: 3
- semiMajorAxis()float646.378e+06
- units :
- m
array(6378137.)
- semiMinorAxis()float646.357e+06
- units :
- m
array(6356752.31424518)
- datumShiftParameters(params)float640.0 0.0 0.0
- units :
- m
array([0., 0., 0.])
- geodeticTerrainHeight()float64229.9
- units :
- m
array(229.93099567)
- ellipsoidName :
- WGS 1984
<xarray.DatasetView> Size: 48B Dimensions: (params: 3) Dimensions without coordinates: params Data variables: semiMajorAxis float64 8B 6.378e+06 semiMinorAxis float64 8B 6.357e+06 datumShiftParameters (params) float64 24B 0.0 0.0 0.0 geodeticTerrainHeight float64 8B 229.9 Attributes: ellipsoidName: WGS 1984ellipsoidParameters- line: 13
- pixel: 13
- line(line)float640.0 1.594e+03 ... 1.913e+04
array([ 0. , 1593.8334, 3187.6667, 4781.5 , 6375.3335, 7969.167 , 9563. , 11156.833 , 12750.666 , 14344.499 , 15938.332 , 17532.166 , 19126. ]) - pixel(pixel)float640.0 1.503e+03 ... 1.804e+04
array([ 0. , 1503.4166, 3006.8333, 4510.25 , 6013.6665, 7517.083 , 9020.5 , 10523.917 , 12027.334 , 13530.751 , 15034.168 , 16537.584 , 18041. ])
- latitude(line, pixel)float6448.72 48.77 48.82 ... 45.82 45.86
- units :
- deg
array([[48.71534851, 48.76832408, 48.81990431, 48.87008388, 48.9188575 , 48.96622008, 49.0121666 , 49.05669221, 49.09979216, 49.14146184, 49.18169682, 49.22049275, 49.25784541], [48.43281212, 48.48568175, 48.53716957, 48.58727035, 48.6359789 , 48.68329019, 48.72919932, 48.77370149, 48.81679205, 48.85846644, 48.89872032, 48.9375494 , 48.97494952], [48.15022622, 48.20299289, 48.25439115, 48.30441584, 48.35306187, 48.4003243 , 48.44619829, 48.49067914, 48.53376227, 48.57544319, 48.61571763, 48.65458135, 48.69203027], [47.86759144, 47.92025809, 47.97156956, 48.02152082, 48.07010684, 48.11732276, 48.16316384, 48.20762544, 48.25070306, 48.29239228, 48.3326889 , 48.37158874, 48.40908778], [47.58490836, 47.63747783, 47.68870526, 47.73858567, 47.78711413, 47.83428587, 47.88009621, 47.92454059, 47.96761458, 48.00931384, 48.04963421, 48.08857161, 48.12612205], [47.30217761, 47.35465272, 47.40579877, 47.45561087, 47.50408419, 47.551214 , 47.59699572, 47.64142487, 47.68449708, 47.72620807, 47.76655376, 47.80553012, 47.84313321], [47.01939987, 47.07178337, 47.12285066, 47.17259694, 47.22101746, 47.26810757, 47.31386276, 47.35827862, 47.40135085, 47.44307524, 47.48344777, 47.52246445, 47.56012144], [46.73657564, 46.78887021, 46.83986131, 46.88954421, 46.93791423, 46.98496681, 47.03069751, 47.07510199, 47.11817601, 47.15991542, 47.20031628, 47.23937464, 47.27708672], [46.45370547, 46.50591375, 46.55683117, 46.60645308, 46.65477487, 46.70179205, 46.74750026, 46.79189521, 46.83497275, 46.87672879, 46.91715942, 46.95626079, 46.99402914], [46.17078992, 46.2229145 , 46.2737607 , 46.32332395, 46.37159972, 46.41858359, 46.46427126, 46.50865852, 46.55174128, 46.5935155 , 46.63397734, 46.673123 , 46.71094878], [45.88782952, 45.93987293, 45.99065033, 46.04015721, 46.08838913, 46.13534173, 46.18101079, 46.22539215, 46.26848178, 46.31027571, 46.35077016, 46.38996138, 46.42784571], [45.60482463, 45.65678935, 45.70750031, 45.75695308, 45.80514327, 45.85206661, 45.89771892, 45.94209613, 45.98519426, 46.02700941, 46.06753784, 46.10677585, 46.14471985], [45.32177594, 45.37366438, 45.4243112 , 45.47371204, 45.52186258, 45.56875861, 45.61439602, 45.65877079, 45.70187902, 45.74371684, 45.78428058, 45.8235666 , 45.86157135]]) - longitude(line, pixel)float64-84.63 -85.03 ... -89.82 -90.21
- units :
- deg
array([[-84.63397773, -85.03485893, -85.43657252, -85.83909967, -86.24242065, -86.64651572, -87.05136479, -87.45694747, -87.86324307, -88.27023034, -88.67788853, -89.08619582, -89.49513011], [-84.72181616, -85.12049999, -85.52000188, -85.92030343, -86.32138545, -86.72322865, -87.12581347, -87.52912005, -87.93312821, -88.33781725, -88.74316696, -89.14915607, -89.55576306], [-84.80898835, -85.20550748, -85.60283064, -86.00093993, -86.3998166 , -86.79944187, -87.19979668, -87.60086164, -88.00261712, -88.40504292, -88.80811937, -89.21182575, -89.61614106], [-84.89550825, -85.28989472, -85.68507155, -86.08102127, -86.47772559, -86.87516623, -87.27332458, -87.67218176, -88.07171864, -88.47191552, -88.87275325, -89.27421163, -89.67627021], [-84.98138947, -85.37367476, -85.76673703, -86.16055926, -86.55512363, -86.95041229, -87.34640711, -87.74308971, -88.14044141, -88.53844303, -88.93707591, -89.33632037, -89.73615646], ... [-85.31878745, -85.70297133, -86.08788173, -86.47350326, -86.85981979, -87.24681519, -87.6344731 , -88.02277689, -88.41170973, -88.80125428, -89.19139374, -89.58211033, -89.97338607], [-85.40166741, -85.78389909, -86.16684537, -86.55049124, -86.93482099, -87.31981887, -87.70546893, -88.09175498, -88.47866058, -88.86616884, -89.2542634 , -89.64292693, -90.03214187], [-85.48398335, -85.86429106, -86.24530171, -86.62700068, -87.00937263, -87.39240221, -87.77607387, -88.16037182, -88.54528004, -88.93078206, -89.31686194, -89.70350278, -90.09068748], [-85.56574673, -85.9441582 , -86.32326121, -86.7030415 , -87.08348412, -87.4645741 , -87.84629628, -88.22863524, -88.6115754 , -88.99510067, -89.37919553, -89.76384351, -90.14902793], [-85.6469686 , -86.02351092, -86.40073367, -86.77862293, -87.1571641 , -87.53634258, -87.9161436 , -88.29655212, -88.67755293, -89.05913037, -89.4412693 , -89.82395366, -90.20716719]]) - height(line, pixel)float64229.9 229.9 229.9 ... 229.9 229.9
- units :
- m
array([[229.93099567, 229.93099567, 229.93099567, 229.93099567, 229.93099567, 229.93099567, 229.93099567, 229.93099567, 229.93099567, 229.93099567, 229.93099567, 229.93099567, 229.93099567], [229.93099567, 229.93099567, 229.93099567, 229.93099567, 229.93099567, 229.93099567, 229.93099567, 229.93099567, 229.93099567, 229.93099567, 229.93099567, 229.93099567, 229.93099567], [229.93099567, 229.93099567, 229.93099567, 229.93099567, 229.93099567, 229.93099567, 229.93099567, 229.93099567, 229.93099567, 229.93099567, 229.93099567, 229.93099567, 229.93099567], [229.93099567, 229.93099567, 229.93099567, 229.93099567, 229.93099567, 229.93099567, 229.93099567, 229.93099567, 229.93099567, 229.93099567, 229.93099567, 229.93099567, 229.93099567], [229.93099567, 229.93099567, 229.93099567, 229.93099567, 229.93099567, 229.93099567, 229.93099567, 229.93099567, 229.93099567, 229.93099567, 229.93099567, 229.93099567, 229.93099567], ... [229.93099567, 229.93099567, 229.93099567, 229.93099567, 229.93099567, 229.93099567, 229.93099567, 229.93099567, 229.93099567, 229.93099567, 229.93099567, 229.93099567, 229.93099567], [229.93099567, 229.93099567, 229.93099567, 229.93099567, 229.93099567, 229.93099567, 229.93099567, 229.93099567, 229.93099567, 229.93099567, 229.93099567, 229.93099567, 229.93099567], [229.93099567, 229.93099567, 229.93099567, 229.93099567, 229.93099567, 229.93099567, 229.93099567, 229.93099567, 229.93099567, 229.93099567, 229.93099567, 229.93099567, 229.93099567], [229.93099567, 229.93099567, 229.93099567, 229.93099567, 229.93099567, 229.93099567, 229.93099567, 229.93099567, 229.93099567, 229.93099567, 229.93099567, 229.93099567, 229.93099567], [229.93099567, 229.93099567, 229.93099567, 229.93099567, 229.93099567, 229.93099567, 229.93099567, 229.93099567, 229.93099567, 229.93099567, 229.93099567, 229.93099567, 229.93099567]])
- footprint :
- POLYGON ((-84.63397773377159 48.71534850877886, -89.49513011173734 49.25784540666172, -90.20716719088948 45.86157135154452, -85.64696859864004 45.32177593908131, -84.63397773377159 48.71534850877886))
- history :
- annotations
<xarray.DatasetView> Size: 4kB Dimensions: (line: 13, pixel: 13) Coordinates: * line (line) float64 104B 0.0 1.594e+03 ... 1.753e+04 1.913e+04 * pixel (pixel) float64 104B 0.0 1.503e+03 ... 1.654e+04 1.804e+04 Data variables: latitude (line, pixel) float64 1kB 48.72 48.77 48.82 ... 45.78 45.82 45.86 longitude (line, pixel) float64 1kB -84.63 -85.03 -85.44 ... -89.82 -90.21 height (line, pixel) float64 1kB 229.9 229.9 229.9 ... 229.9 229.9 229.9 Attributes: footprint: POLYGON ((-84.63397773377159 48.71534850877886, -89.495130111... history: annotationsgeolocationGrid- coefficients: 20
- biasError()float640.5
- units :
- m
array(0.5)
- randomError()float640.5
- units :
- m
array(0.5)
- latitudeOffset()float6447.29
- units :
- deg
array(47.289)
- longitudeOffset()float64-87.42
- units :
- deg
array(-87.4158)
- heightOffset()float64229.0
- units :
- m
array(229.)
- lineNumeratorCoefficients(coefficients)float640.009342 -0.1851 ... -3.352e-07 0.0
array([ 9.34170268e-03, -1.85068703e-01, -1.12574618e+00, -6.10144309e-06, 6.20882108e-03, 8.06590972e-08, -5.45868399e-08, -1.94295403e-02, -6.43747058e-03, 2.00568473e-08, 1.63147366e-06, -2.60296220e-05, 8.23154596e-05, -1.30237621e-06, -4.14370442e-05, -2.42257289e-05, -7.97568197e-06, 2.96987826e-07, -3.35202910e-07, 0.00000000e+00]) - lineDenominatorCoefficients(coefficients)float641.0 0.005121 0.004405 ... 0.0 0.0
array([ 1.00000000e+00, 5.12053136e-03, 4.40524404e-03, -4.02297328e-08, 3.02428740e-05, -1.50312762e-06, 3.15315853e-07, 2.35759154e-05, 6.22136693e-06, 7.08118918e-06, 0.00000000e+00, -9.88062577e-07, -1.08733801e-05, 3.67241164e-08, 3.95919196e-05, 6.95203246e-07, 0.00000000e+00, 0.00000000e+00, 0.00000000e+00, 0.00000000e+00]) - pixelNumeratorCoefficients(coefficients)float640.03373 1.155 ... -1.017e-06
array([ 3.37294658e-02, 1.15513562e+00, -2.07308333e-01, 3.89731639e-03, -1.31335411e-02, 8.55127854e-04, -6.68586537e-05, -2.21233716e-02, -1.20625919e-03, -1.44350315e-05, -1.94326611e-04, 7.93410866e-05, -8.59207559e-04, -4.37958576e-04, 4.97445616e-04, 6.45803713e-07, 7.86466731e-05, 6.73269299e-04, 1.06237140e-05, -1.01657727e-06]) - pixelDenominatorCoefficients(coefficients)float641.0 -0.01611 ... 5.209e-07
array([ 1.00000000e+00, -1.61104443e-02, 2.18819967e-02, -8.60798873e-04, -1.58733461e-04, -2.81496417e-04, 9.49380126e-05, 2.25363730e-04, 6.85153488e-04, -3.80327273e-04, 1.84158910e-04, -1.02652130e-06, -2.31738906e-05, -1.88567979e-06, 1.76799266e-05, 2.88245746e-05, -1.33907233e-05, -4.16793424e-04, -1.07843001e-05, 5.20908763e-07])
- lineFitQuality :
- 0.00334060350484419
- pixelFitQuality :
- 0.07741306192873083
- lineOffset :
- 9562
- pixelOffset :
- 9021
- lineScale :
- 9564
- pixelScale :
- 9021
- latitudeScale :
- 1.9694
- longitudeScale :
- 2.7977
- heightScale :
- 601.0
<xarray.DatasetView> Size: 680B Dimensions: (coefficients: 20) Dimensions without coordinates: coefficients Data variables: biasError float64 8B 0.5 randomError float64 8B 0.5 latitudeOffset float64 8B 47.29 longitudeOffset float64 8B -87.42 heightOffset float64 8B 229.0 lineNumeratorCoefficients (coefficients) float64 160B 0.009342 ... 0.0 lineDenominatorCoefficients (coefficients) float64 160B 1.0 ... 0.0 pixelNumeratorCoefficients (coefficients) float64 160B 0.03373 ... -1.... pixelDenominatorCoefficients (coefficients) float64 160B 1.0 ... 5.209e-07 Attributes: lineFitQuality: 0.00334060350484419 pixelFitQuality: 0.07741306192873083 lineOffset: 9562 pixelOffset: 9021 lineScale: 9564 pixelScale: 9021 latitudeScale: 1.9694 longitudeScale: 2.7977 heightScale: 601.0rationalFunctions
<xarray.DatasetView> Size: 0B Dimensions: () Data variables: *empty*geographicInformation- sarCalibrationType: 3
- pole: 2
- sarCalibrationType(sarCalibrationType)<U12'Beta Nought' ... 'Sigma Nought'
array(['Beta Nought', 'Gamma', 'Sigma Nought'], dtype='<U12')
- pole(pole)<U2'HH' 'HV'
array(['HH', 'HV'], dtype='<U2')
- lookupTableFileName(sarCalibrationType, pole)<U15'lutBeta_HH.xml' ... 'lutSigma_H...
array([['lutBeta_HH.xml', 'lutBeta_HV.xml'], ['lutGamma_HH.xml', 'lutGamma_HV.xml'], ['lutSigma_HH.xml', 'lutSigma_HV.xml']], dtype='<U15') - noiseLevelFileName(pole)<U18'noiseLevels_HH.xml' 'noiseLevel...
array(['noiseLevels_HH.xml', 'noiseLevels_HV.xml'], dtype='<U18')
- productFormat :
- GeoTIFF
- outputMediaInterleaving :
- BSQ
- incidenceAngleFileName :
- incidenceAngles.xml
<xarray.DatasetView> Size: 664B Dimensions: (sarCalibrationType: 3, pole: 2) Coordinates: * sarCalibrationType (sarCalibrationType) <U12 144B 'Beta Nought' ... 'Si... * pole (pole) <U2 16B 'HH' 'HV' Data variables: lookupTableFileName (sarCalibrationType, pole) <U15 360B 'lutBeta_HH.xml... noiseLevelFileName (pole) <U18 144B 'noiseLevels_HH.xml' 'noiseLevels_H... Attributes: productFormat: GeoTIFF outputMediaInterleaving: BSQ incidenceAngleFileName: incidenceAngles.xmlimageReferenceAttributes- pole: 2
- pole(pole)<U2'HH' 'HV'
array(['HH', 'HV'], dtype='<U2')
- ipdf(pole)<U27'../imagery/1050605_1_HH.tif' '....
array(['../imagery/1050605_1_HH.tif', '../imagery/1050605_1_HV.tif'], dtype='<U27') - incAngNearRng()float6426.87
- units :
- deg
array(26.87371332)
- incAngFarRng()float6450.94
- units :
- deg
array(50.94029276)
- slantRangeNearEdge()float646.612e+05
- units :
- m
array(661244.21865407)
- slantRangeFarEdge()float648.913e+05
- units :
- m
array(891305.35413327)
- mean(pole)float649.975e+03 3.564e+03
array([9974.52832031, 3563.61157227])
- sigma(pole)float646.879e+03 3.023e+03
array([6878.79248047, 3023.05566406])
- pixelOffset :
- 0
- lineOffset :
- 0
- numLines :
- 19127
- samplesPerLine :
- 18042
<xarray.DatasetView> Size: 296B Dimensions: (pole: 2) Coordinates: * pole (pole) <U2 16B 'HH' 'HV' Data variables: ipdf (pole) <U27 216B '../imagery/1050605_1_HH.tif' '../im... incAngNearRng float64 8B 26.87 incAngFarRng float64 8B 50.94 slantRangeNearEdge float64 8B 6.612e+05 slantRangeFarEdge float64 8B 8.913e+05 mean (pole) float64 16B 9.975e+03 3.564e+03 sigma (pole) float64 16B 6.879e+03 3.023e+03 Attributes: pixelOffset: 0 lineOffset: 0 numLines: 19127 samplesPerLine: 18042sceneAttributes- burst_maps: 1
- burst: 776
- beam: 8
- burst(burst)int640 1 2 3 4 5 ... 771 772 773 774 775
array([ 0, 1, 2, ..., 773, 774, 775])
- beam(beam)<U5'SC-10' 'SC-3' ... 'SC-8' 'SC-9'
array(['SC-10', 'SC-3', 'SC-4', 'SC-5', 'SC-6', 'SC-7', 'SC-8', 'SC-9'], dtype='<U5')
- topLeftLine(burst_maps, burst, beam)float64nan 11.0 nan nan ... nan nan nan
array([[[ nan, 1.1000e+01, nan, ..., nan, nan, nan], [ nan, nan, 3.4000e+01, ..., nan, nan, nan], [ nan, nan, nan, ..., nan, nan, nan], ..., [ nan, nan, nan, ..., nan, 1.8769e+04, nan], [ nan, nan, nan, ..., nan, nan, 1.8796e+04], [1.8823e+04, nan, nan, ..., nan, nan, nan]]]) - topLeftPixel(burst_maps, burst, beam)float64nan 1.566e+04 nan ... nan nan nan
array([[[ nan, 15655., nan, ..., nan, nan, nan], [ nan, nan, 13430., ..., nan, nan, nan], [ nan, nan, nan, ..., nan, nan, nan], ..., [ nan, nan, nan, ..., nan, 4627., nan], [ nan, nan, nan, ..., nan, nan, 2401.], [ 112., nan, nan, ..., nan, nan, nan]]]) - bottomRightLine(burst_maps, burst, beam)float64nan 274.0 nan nan ... nan nan nan
array([[[ nan, 274., nan, ..., nan, nan, nan], [ nan, nan, 296., ..., nan, nan, nan], [ nan, nan, nan, ..., nan, nan, nan], ..., [ nan, nan, nan, ..., nan, 19045., nan], [ nan, nan, nan, ..., nan, nan, 19099.], [19112., nan, nan, ..., nan, nan, nan]]]) - bottomRightPixel(burst_maps, burst, beam)float64nan 1.794e+04 nan ... nan nan nan
array([[[ nan, 17944., nan, ..., nan, nan, nan], [ nan, nan, 15662., ..., nan, nan, nan], [ nan, nan, nan, ..., nan, nan, nan], ..., [ nan, nan, nan, ..., nan, 6861., nan], [ nan, nan, nan, ..., nan, nan, 4634.], [ 2408., nan, nan, ..., nan, nan, nan]]])
- numberOfEntries :
- 776
- numberOfBeams :
- 8
<xarray.DatasetView> Size: 205kB Dimensions: (burst_maps: 1, burst: 776, beam: 8) Coordinates: * burst (burst) int64 6kB 0 1 2 3 4 5 ... 770 771 772 773 774 775 * beam (beam) <U5 160B 'SC-10' 'SC-3' 'SC-4' ... 'SC-8' 'SC-9' Dimensions without coordinates: burst_maps Data variables: topLeftLine (burst_maps, burst, beam) float64 50kB nan 11.0 ... nan topLeftPixel (burst_maps, burst, beam) float64 50kB nan ... nan bottomRightLine (burst_maps, burst, beam) float64 50kB nan 274.0 ... nan bottomRightPixel (burst_maps, burst, beam) float64 50kB nan ... nan Attributes: numberOfEntries: 776 numberOfBeams: 8grdBurstMap- burst_maps: 1
- burst: 776
- coefficients: 4
- burst(burst)int640 1 2 3 4 5 ... 771 772 773 774 775
array([ 0, 1, 2, ..., 773, 774, 775])
- timeOfDopplerCentroidEstimate(burst_maps, burst)<U27'2020-02-14T11:59:05.878596Z' .....
array([['2020-02-14T11:59:05.878596Z', '2020-02-14T11:59:05.941159Z', '2020-02-14T11:59:06.005965Z', '2020-02-14T11:59:06.073034Z', '2020-02-14T11:59:06.142742Z', '2020-02-14T11:59:06.215321Z', '2020-02-14T11:59:06.290712Z', '2020-02-14T11:59:06.369101Z', '2020-02-14T11:59:06.439174Z', '2020-02-14T11:59:06.501737Z', '2020-02-14T11:59:06.566544Z', '2020-02-14T11:59:06.633612Z', '2020-02-14T11:59:06.703321Z', '2020-02-14T11:59:06.775899Z', '2020-02-14T11:59:06.851290Z', '2020-02-14T11:59:06.929680Z', '2020-02-14T11:59:06.999753Z', '2020-02-14T11:59:07.062315Z', '2020-02-14T11:59:07.127122Z', '2020-02-14T11:59:07.194191Z', '2020-02-14T11:59:07.263899Z', '2020-02-14T11:59:07.336477Z', '2020-02-14T11:59:07.411869Z', '2020-02-14T11:59:07.490258Z', '2020-02-14T11:59:07.560331Z', '2020-02-14T11:59:07.622894Z', '2020-02-14T11:59:07.687700Z', '2020-02-14T11:59:07.754769Z', '2020-02-14T11:59:07.824478Z', '2020-02-14T11:59:07.897056Z', '2020-02-14T11:59:07.972447Z', '2020-02-14T11:59:08.050837Z', '2020-02-14T11:59:08.120909Z', '2020-02-14T11:59:08.183472Z', '2020-02-14T11:59:08.248279Z', '2020-02-14T11:59:08.315348Z', '2020-02-14T11:59:08.385056Z', '2020-02-14T11:59:08.457634Z', '2020-02-14T11:59:08.533026Z', '2020-02-14T11:59:08.611415Z', ... '2020-02-14T11:59:57.556374Z', '2020-02-14T11:59:57.623369Z', '2020-02-14T11:59:57.693001Z', '2020-02-14T11:59:57.765502Z', '2020-02-14T11:59:57.840814Z', '2020-02-14T11:59:57.919121Z', '2020-02-14T11:59:57.989120Z', '2020-02-14T11:59:58.051615Z', '2020-02-14T11:59:58.116350Z', '2020-02-14T11:59:58.183346Z', '2020-02-14T11:59:58.252977Z', '2020-02-14T11:59:58.325479Z', '2020-02-14T11:59:58.400790Z', '2020-02-14T11:59:58.479098Z', '2020-02-14T11:59:58.549097Z', '2020-02-14T11:59:58.611592Z', '2020-02-14T11:59:58.676327Z', '2020-02-14T11:59:58.743322Z', '2020-02-14T11:59:58.812954Z', '2020-02-14T11:59:58.885455Z', '2020-02-14T11:59:58.960767Z', '2020-02-14T11:59:59.039074Z', '2020-02-14T11:59:59.109073Z', '2020-02-14T11:59:59.171568Z', '2020-02-14T11:59:59.236303Z', '2020-02-14T11:59:59.303298Z', '2020-02-14T11:59:59.372930Z', '2020-02-14T11:59:59.445431Z', '2020-02-14T11:59:59.520743Z', '2020-02-14T11:59:59.599051Z', '2020-02-14T11:59:59.669050Z', '2020-02-14T11:59:59.731544Z', '2020-02-14T11:59:59.796280Z', '2020-02-14T11:59:59.863275Z', '2020-02-14T11:59:59.932906Z', '2020-02-14T12:00:00.005408Z', '2020-02-14T12:00:00.080720Z', '2020-02-14T12:00:00.159027Z']], dtype='<U27') - dopplerAmbiguity(burst_maps, burst)int640 0 0 0 0 0 0 0 ... 0 0 0 0 0 0 0 0
array([[0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0]]) - dopplerCentroidReferenceTime(burst_maps, burst)float640.004434 0.004579 ... 0.005726
- units :
- s
array([[0.00443406, 0.0045792 , 0.00474019, 0.00491579, 0.00510377, 0.00530377, 0.00551404, 0.00573308, 0.00443406, 0.0045792 , 0.00474019, 0.00491579, 0.00510377, 0.00530377, 0.00551404, 0.00573308, 0.00443406, 0.0045792 , 0.00474019, 0.00491579, 0.00510377, 0.00530377, 0.00551404, 0.00573308, 0.00443406, 0.0045792 , 0.00474019, 0.00491579, 0.00510377, 0.00530377, 0.00551404, 0.00573308, 0.00443406, 0.0045792 , 0.00474019, 0.00491579, 0.00510377, 0.00530377, 0.00551404, 0.00573308, 0.00443406, 0.0045792 , 0.00474019, 0.00491579, 0.00510377, 0.00530377, 0.00551404, 0.00573308, 0.00443406, 0.0045792 , 0.00474019, 0.00491579, 0.00510377, 0.00530377, 0.00551404, 0.00573308, 0.00443406, 0.0045792 , 0.00474019, 0.00491579, 0.00510377, 0.00530377, 0.00551404, 0.00573308, 0.00443406, 0.0045792 , 0.00474019, 0.00491579, 0.00510377, 0.00530377, 0.00551404, 0.00573308, 0.00443406, 0.0045792 , 0.00474019, 0.00491579, 0.00510377, 0.00530377, 0.00551404, 0.00573308, 0.00443406, 0.0045792 , 0.00474019, 0.00491579, 0.00510377, 0.00530377, 0.00551404, 0.00573308, 0.00443406, 0.0045792 , 0.00474019, 0.00491579, 0.00510377, 0.00530284, 0.00551301, 0.00573206, 0.00443324, 0.00457838, 0.00473927, 0.00491487, ... 0.00442826, 0.0045734 , 0.00473419, 0.00490939, 0.00509717, 0.00529697, 0.00550704, 0.00572568, 0.00442826, 0.0045734 , 0.00473419, 0.00490939, 0.00509717, 0.00529697, 0.00550704, 0.00572568, 0.00442826, 0.0045734 , 0.00473419, 0.00490939, 0.00509717, 0.00529697, 0.00550704, 0.00572568, 0.00442826, 0.0045734 , 0.00473419, 0.00490939, 0.00509717, 0.00529697, 0.00550704, 0.00572568, 0.00442826, 0.0045734 , 0.00473419, 0.00490939, 0.00509717, 0.00529697, 0.00550704, 0.00572568, 0.00442826, 0.0045734 , 0.00473419, 0.00490939, 0.00509717, 0.00529697, 0.00550704, 0.00572568, 0.00442826, 0.0045734 , 0.00473419, 0.00490939, 0.00509717, 0.00529697, 0.00550704, 0.00572568, 0.00442826, 0.0045734 , 0.00473419, 0.00490939, 0.00509717, 0.00529697, 0.00550704, 0.00572568, 0.00442826, 0.0045734 , 0.00473419, 0.00490939, 0.00509717, 0.00529697, 0.00550704, 0.00572568, 0.00442826, 0.0045734 , 0.00473419, 0.00490939, 0.00509717, 0.00529697, 0.00550704, 0.00572568, 0.00442826, 0.0045734 , 0.00473419, 0.00490939, 0.00509717, 0.00529697, 0.00550704, 0.00572568, 0.00442826, 0.0045734 , 0.00473419, 0.00490939, 0.00509717, 0.00529697, 0.00550704, 0.00572568]]) - dopplerCentroidCoefficients(burst_maps, burst, coefficients)float64-115.8 -1.217e+05 ... -6.922e+09
array([[[-1.15846091e+02, -1.21655624e+05, 9.50728602e+07, -7.68131828e+10], [-1.11244531e+02, -3.37617034e+04, 2.60965570e+07, -1.79139903e+10], [-1.10297096e+02, 2.57329403e+04, -7.08421037e+06, 2.14627123e+09], ..., [-9.25936538e+01, 1.13153129e+05, -3.49585985e+07, 1.06149430e+10], [-7.22128833e+01, -7.29952970e+04, 2.26658618e+07, -6.62808411e+09], [-6.70541456e+01, -9.45544348e+04, 2.65331108e+07, -6.92207992e+09]]]) - dopplerCentroidConfidence(burst_maps, burst)float640.9194 0.9024 ... 0.9058 0.8719
array([[0.91943437, 0.90240347, 0.91319323, 0.90607947, 0.91211849, 0.88851607, 0.91132945, 0.87252313, 0.86517894, 0.84135336, 0.85343832, 0.84145999, 0.85041243, 0.81127751, 0.85433996, 0.79415482, 0.86517894, 0.84135336, 0.85343832, 0.84145999, 0.85041243, 0.81127751, 0.85433996, 0.79415482, 0.86517894, 0.84135336, 0.85343832, 0.84145999, 0.85041243, 0.81127751, 0.85433996, 0.79415482, 0.86517894, 0.84135336, 0.85343832, 0.84145999, 0.85041243, 0.81127751, 0.85433996, 0.79415482, 0.86517894, 0.84135336, 0.85343832, 0.84145999, 0.85041243, 0.81127751, 0.85433996, 0.79415482, 0.86517894, 0.84135336, 0.85343832, 0.84145999, 0.85041243, 0.81127751, 0.85433996, 0.79415482, 0.86517894, 0.84135336, 0.85343832, 0.84145999, 0.85041243, 0.81127751, 0.85433996, 0.79415482, 0.86517894, 0.84135336, 0.85343832, 0.84145999, 0.85041243, 0.81127751, 0.85433996, 0.79415482, 0.86517894, 0.84135336, 0.85343832, 0.84145999, 0.85041243, 0.81127751, 0.85433996, 0.79415482, 0.86517894, 0.84135336, 0.85343832, 0.84145999, 0.85041243, 0.81127751, 0.85433996, 0.79415482, 0.8651402 , 0.84336436, 0.85488534, 0.84276432, 0.8532235 , 0.78267181, 0.85452712, 0.79772073, 0.86256206, 0.84108722, 0.85554105, 0.83041793, ... 0.85408765, 0.85039192, 0.86364961, 0.85312957, 0.86396831, 0.82329369, 0.84822226, 0.82566583, 0.83839625, 0.85144204, 0.86724627, 0.85007358, 0.86618584, 0.82272834, 0.85789758, 0.82313895, 0.84370238, 0.85497689, 0.86757767, 0.85269743, 0.8631689 , 0.81613314, 0.85770303, 0.81378329, 0.8604911 , 0.85634673, 0.86747861, 0.86092389, 0.86026198, 0.81639498, 0.85237098, 0.81369096, 0.83574498, 0.8562153 , 0.87138528, 0.8632797 , 0.86288023, 0.82592934, 0.8557471 , 0.82057756, 0.81373024, 0.84203869, 0.87175888, 0.86215395, 0.86222005, 0.83140004, 0.85657948, 0.82455188, 0.84198791, 0.80867952, 0.87012118, 0.85975724, 0.85751688, 0.82662129, 0.85558957, 0.81926048, 0.86666608, 0.80411774, 0.86941314, 0.85473907, 0.85984886, 0.82358229, 0.85123849, 0.81486213, 0.87202793, 0.82597536, 0.86818337, 0.85660076, 0.86621785, 0.81653589, 0.83836633, 0.80784112, 0.87270957, 0.83828896, 0.8686493 , 0.86131215, 0.86511981, 0.81195182, 0.82930273, 0.79621059, 0.870408 , 0.84605652, 0.86274505, 0.86136776, 0.8581602 , 0.81362647, 0.83492255, 0.79079854, 0.9225108 , 0.9097333 , 0.9148221 , 0.9174872 , 0.91404605, 0.88647503, 0.90583885, 0.87187672]])
- numberOfEstimates :
- 776
<xarray.DatasetView> Size: 133kB Dimensions: (burst_maps: 1, burst: 776, coefficients: 4) Coordinates: * burst (burst) int64 6kB 0 1 2 3 ... 772 773 774 775 Dimensions without coordinates: burst_maps, coefficients Data variables: timeOfDopplerCentroidEstimate (burst_maps, burst) <U27 84kB '2020-02-14T... dopplerAmbiguity (burst_maps, burst) int64 6kB 0 0 0 ... 0 0 0 dopplerCentroidReferenceTime (burst_maps, burst) float64 6kB 0.004434 .... dopplerCentroidCoefficients (burst_maps, burst, coefficients) float64 25kB ... dopplerCentroidConfidence (burst_maps, burst) float64 6kB 0.9194 ...... Attributes: numberOfEstimates: 776dopplerCentroid- burst_maps: 1
- burst: 776
- coefficients: 5
- burst(burst)int640 1 2 3 4 5 ... 771 772 773 774 775
array([ 0, 1, 2, ..., 773, 774, 775])
- timeOfDopplerRateEstimate(burst_maps, burst)<U27'2020-02-14T11:59:05.878596Z' .....
array([['2020-02-14T11:59:05.878596Z', '2020-02-14T11:59:05.941159Z', '2020-02-14T11:59:06.005965Z', '2020-02-14T11:59:06.073034Z', '2020-02-14T11:59:06.142742Z', '2020-02-14T11:59:06.215321Z', '2020-02-14T11:59:06.290712Z', '2020-02-14T11:59:06.369101Z', '2020-02-14T11:59:06.439174Z', '2020-02-14T11:59:06.501737Z', '2020-02-14T11:59:06.566544Z', '2020-02-14T11:59:06.633612Z', '2020-02-14T11:59:06.703321Z', '2020-02-14T11:59:06.775899Z', '2020-02-14T11:59:06.851290Z', '2020-02-14T11:59:06.929680Z', '2020-02-14T11:59:06.999753Z', '2020-02-14T11:59:07.062315Z', '2020-02-14T11:59:07.127122Z', '2020-02-14T11:59:07.194191Z', '2020-02-14T11:59:07.263899Z', '2020-02-14T11:59:07.336477Z', '2020-02-14T11:59:07.411869Z', '2020-02-14T11:59:07.490258Z', '2020-02-14T11:59:07.560331Z', '2020-02-14T11:59:07.622894Z', '2020-02-14T11:59:07.687700Z', '2020-02-14T11:59:07.754769Z', '2020-02-14T11:59:07.824478Z', '2020-02-14T11:59:07.897056Z', '2020-02-14T11:59:07.972447Z', '2020-02-14T11:59:08.050837Z', '2020-02-14T11:59:08.120909Z', '2020-02-14T11:59:08.183472Z', '2020-02-14T11:59:08.248279Z', '2020-02-14T11:59:08.315348Z', '2020-02-14T11:59:08.385056Z', '2020-02-14T11:59:08.457634Z', '2020-02-14T11:59:08.533026Z', '2020-02-14T11:59:08.611415Z', ... '2020-02-14T11:59:57.556374Z', '2020-02-14T11:59:57.623369Z', '2020-02-14T11:59:57.693001Z', '2020-02-14T11:59:57.765502Z', '2020-02-14T11:59:57.840814Z', '2020-02-14T11:59:57.919121Z', '2020-02-14T11:59:57.989120Z', '2020-02-14T11:59:58.051615Z', '2020-02-14T11:59:58.116350Z', '2020-02-14T11:59:58.183346Z', '2020-02-14T11:59:58.252977Z', '2020-02-14T11:59:58.325479Z', '2020-02-14T11:59:58.400790Z', '2020-02-14T11:59:58.479098Z', '2020-02-14T11:59:58.549097Z', '2020-02-14T11:59:58.611592Z', '2020-02-14T11:59:58.676327Z', '2020-02-14T11:59:58.743322Z', '2020-02-14T11:59:58.812954Z', '2020-02-14T11:59:58.885455Z', '2020-02-14T11:59:58.960767Z', '2020-02-14T11:59:59.039074Z', '2020-02-14T11:59:59.109073Z', '2020-02-14T11:59:59.171568Z', '2020-02-14T11:59:59.236303Z', '2020-02-14T11:59:59.303298Z', '2020-02-14T11:59:59.372930Z', '2020-02-14T11:59:59.445431Z', '2020-02-14T11:59:59.520743Z', '2020-02-14T11:59:59.599051Z', '2020-02-14T11:59:59.669050Z', '2020-02-14T11:59:59.731544Z', '2020-02-14T11:59:59.796280Z', '2020-02-14T11:59:59.863275Z', '2020-02-14T11:59:59.932906Z', '2020-02-14T12:00:00.005408Z', '2020-02-14T12:00:00.080720Z', '2020-02-14T12:00:00.159027Z']], dtype='<U27') - dopplerRateReferenceTime(burst_maps, burst)float640.004417 0.00456 ... 0.005699
- units :
- s
array([[0.00441722, 0.00456038, 0.00471956, 0.00489355, 0.00508048, 0.00527901, 0.00548796, 0.00570624, 0.00441722, 0.00456038, 0.00471956, 0.00489355, 0.00508048, 0.00527901, 0.00548796, 0.00570624, 0.00441722, 0.00456038, 0.00471956, 0.00489355, 0.00508048, 0.00527901, 0.00548796, 0.00570624, 0.00441722, 0.00456038, 0.00471956, 0.00489355, 0.00508048, 0.00527901, 0.00548796, 0.00570624, 0.00441722, 0.00456038, 0.00471956, 0.00489355, 0.00508048, 0.00527901, 0.00548796, 0.00570624, 0.00441722, 0.00456038, 0.00471956, 0.00489355, 0.00508048, 0.00527901, 0.00548796, 0.00570624, 0.00441722, 0.00456038, 0.00471956, 0.00489355, 0.00508048, 0.00527901, 0.00548796, 0.00570624, 0.00441722, 0.00456038, 0.00471956, 0.00489355, 0.00508048, 0.00527901, 0.00548796, 0.00570624, 0.00441722, 0.00456038, 0.00471956, 0.00489355, 0.00508048, 0.00527901, 0.00548796, 0.00570624, 0.00441722, 0.00456038, 0.00471956, 0.00489355, 0.00508048, 0.00527901, 0.00548796, 0.00570624, 0.00441722, 0.00456038, 0.00471956, 0.00489355, 0.00508048, 0.00527901, 0.00548796, 0.00570624, 0.00441722, 0.00456038, 0.00471956, 0.00489355, 0.00508048, 0.00527901, 0.00548796, 0.00570624, 0.00441722, 0.00456038, 0.00471956, 0.00489355, ... 0.00441135, 0.00455465, 0.00471356, 0.00488728, 0.0050738 , 0.00527221, 0.00548102, 0.00569877, 0.00441135, 0.00455465, 0.00471356, 0.00488728, 0.0050738 , 0.00527221, 0.00548102, 0.00569877, 0.00441135, 0.00455465, 0.00471356, 0.00488728, 0.0050738 , 0.00527221, 0.00548102, 0.00569877, 0.00441135, 0.00455465, 0.00471356, 0.00488728, 0.0050738 , 0.00527221, 0.00548102, 0.00569877, 0.00441135, 0.00455465, 0.00471356, 0.00488728, 0.0050738 , 0.00527221, 0.00548102, 0.00569877, 0.00441135, 0.00455465, 0.00471356, 0.00488728, 0.0050738 , 0.00527221, 0.00548102, 0.00569877, 0.00441135, 0.00455465, 0.00471356, 0.00488728, 0.0050738 , 0.00527221, 0.00548102, 0.00569877, 0.00441135, 0.00455465, 0.00471356, 0.00488728, 0.0050738 , 0.00527221, 0.00548102, 0.00569877, 0.00441135, 0.00455465, 0.00471356, 0.00488728, 0.0050738 , 0.00527221, 0.00548102, 0.00569877, 0.00441135, 0.00455465, 0.00471356, 0.00488728, 0.0050738 , 0.00527221, 0.00548102, 0.00569877, 0.00441135, 0.00455465, 0.00471356, 0.00488728, 0.0050738 , 0.00527221, 0.00548102, 0.00569877, 0.00441135, 0.00455465, 0.00471356, 0.00488728, 0.0050738 , 0.00527221, 0.00548102, 0.00569877]]) - dopplerRateCoefficients(burst_maps, burst, coefficients)float64-2.893e+03 6.764e+05 ... -2.047e+12
array([[[-2.89324661e+03, 6.76360020e+05, -1.59625036e+08, 4.40828162e+10, -1.59565926e+13], [-2.79956608e+03, 6.33177097e+05, -1.42609427e+08, 3.50473505e+10, -9.63895974e+12], [-2.70225921e+03, 5.90284932e+05, -1.27313313e+08, 2.89307471e+10, -6.71840373e+12], ..., [-2.41246486e+03, 4.71851427e+05, -8.98571193e+07, 1.73977735e+10, -3.13356188e+12], [-2.31770517e+03, 4.36486510e+05, -7.97695164e+07, 1.47727710e+10, -2.52342311e+12], [-2.22629815e+03, 4.03743770e+05, -7.08296359e+07, 1.25678361e+10, -2.04699498e+12]]])
- numberOfEstimates :
- 776
<xarray.DatasetView> Size: 127kB Dimensions: (burst_maps: 1, burst: 776, coefficients: 5) Coordinates: * burst (burst) int64 6kB 0 1 2 3 4 ... 772 773 774 775 Dimensions without coordinates: burst_maps, coefficients Data variables: timeOfDopplerRateEstimate (burst_maps, burst) <U27 84kB '2020-02-14T11:5... dopplerRateReferenceTime (burst_maps, burst) float64 6kB 0.004417 ... 0... dopplerRateCoefficients (burst_maps, burst, coefficients) float64 31kB ... Attributes: numberOfEstimates: 776dopplerRate- pixel: 786
- pixel(pixel)int64-14 9 32 55 ... 17995 18018 18041
array([ -14, 9, 32, ..., 17995, 18018, 18041])
- angles(pixel)float6426.87 26.91 26.95 ... 50.93 50.95
- units :
- deg
array([26.87371332, 26.91337928, 26.95302158, 26.99264021, 27.03223515, 27.07180641, 27.11135395, 27.15087779, 27.1903779 , 27.22985429, 27.26930693, 27.30873583, 27.34814096, 27.38752233, 27.42687993, 27.46621373, 27.50552375, 27.54480996, 27.58407236, 27.62331095, 27.6625257 , 27.70171662, 27.7408837 , 27.78002692, 27.81914629, 27.85824179, 27.89731341, 27.93636115, 27.975385 , 28.01438495, 28.05336099, 28.09231312, 28.13124133, 28.17014562, 28.20902597, 28.24788238, 28.28671484, 28.32552334, 28.36430788, 28.40306846, 28.44180506, 28.48051768, 28.51920631, 28.55787095, 28.59651158, 28.63512821, 28.67372083, 28.71228943, 28.75083401, 28.78935455, 28.82785106, 28.86632353, 28.90477195, 28.94319632, 28.98159663, 29.01997288, 29.05832507, 29.09665318, 29.13495721, 29.17323716, 29.21149302, 29.24972478, 29.28793246, 29.32611602, 29.36427549, 29.40241084, 29.44052208, 29.4786092 , 29.51667219, 29.55471106, 29.5927258 , 29.6307164 , 29.66868286, 29.70662518, 29.74454335, 29.78243737, 29.82030724, 29.85815295, 29.8959745 , 29.93377188, 29.9715451 , 30.00929415, 30.04701903, 30.08471973, 30.12239625, 30.16004858, 30.19767674, 30.2352807 , 30.27286048, 30.31041606, 30.34794745, 30.38545464, 30.42293763, 30.46039642, 30.49783101, 30.53524139, 30.57262756, 30.60998953, 30.64732728, 30.68464082, ... 48.71689308, 48.74126538, 48.76561973, 48.78995613, 48.8142746 , 48.83857516, 48.86285781, 48.88712259, 48.91136949, 48.93559854, 48.95980975, 48.98400313, 49.00817871, 49.03233649, 49.05647649, 49.08059873, 49.10470321, 49.12878996, 49.152859 , 49.17691032, 49.20094396, 49.22495992, 49.24895823, 49.27293888, 49.29690191, 49.32084732, 49.34477513, 49.36868536, 49.39257802, 49.41645312, 49.44031068, 49.46415071, 49.48797323, 49.51177826, 49.53556581, 49.55933589, 49.58308852, 49.60682371, 49.63054148, 49.65424184, 49.67792482, 49.70159041, 49.72523864, 49.74886953, 49.77248308, 49.79607932, 49.81965826, 49.8432199 , 49.86676427, 49.89029139, 49.91380126, 49.9372939 , 49.96076933, 49.98422756, 50.00766861, 50.03109249, 50.05449921, 50.07788879, 50.10126125, 50.1246166 , 50.14795485, 50.17127603, 50.19458013, 50.21786719, 50.24113721, 50.26439021, 50.2876262 , 50.3108452 , 50.33404722, 50.35723228, 50.38040039, 50.40355157, 50.42668583, 50.44980318, 50.47290365, 50.49598725, 50.51905398, 50.54210387, 50.56513693, 50.58815317, 50.61115261, 50.63413527, 50.65710115, 50.68005028, 50.70298267, 50.72589833, 50.74879727, 50.77167952, 50.79454508, 50.81739398, 50.84022622, 50.86304182, 50.88584079, 50.90862316, 50.93138893, 50.9541414 ])
- pixelFirstAnglesValue :
- 18041
- stepSize :
- -23
- numberOfValues :
- 786
<xarray.DatasetView> Size: 13kB Dimensions: (pixel: 786) Coordinates: * pixel (pixel) int64 6kB -14 9 32 55 78 ... 17949 17972 17995 18018 18041 Data variables: angles (pixel) float64 6kB 26.87 26.91 26.95 26.99 ... 50.91 50.93 50.95 Attributes: pixelFirstAnglesValue: 18041 stepSize: -23 numberOfValues: 786incidenceAngles- sarCalibrationType: 3
- pole: 2
- pixel: 786
- sarCalibrationType(sarCalibrationType)<U12'Beta Nought' ... 'Sigma Nought'
array(['Beta Nought', 'Gamma', 'Sigma Nought'], dtype='<U12')
- pole(pole)<U2'HH' 'HV'
array(['HH', 'HV'], dtype='<U2')
- pixel(pixel)int64-14 9 32 55 ... 17995 18018 18041
array([ -14, 9, 32, ..., 17995, 18018, 18041])
- lookup_tables(pixel, sarCalibrationType, pole)float642.731e+09 2.731e+09 ... 5.693e+08
- pixelFirstLutValue :
- 18041
- stepSize :
- -23
- numberOfValues :
- 786
- offset :
- 0.0
array([[[2.73082741e+09, 2.73082741e+09], [2.21500277e+09, 2.21500277e+09], [3.51619892e+09, 3.51619892e+09]], [[2.72612253e+09, 2.72612253e+09], [2.21298095e+09, 2.21298095e+09], [3.51127167e+09, 3.51127167e+09]], [[2.72142141e+09, 2.72142141e+09], [2.21095918e+09, 2.21095918e+09], [3.50634781e+09, 3.50634781e+09]], ..., [[2.59798046e+08, 2.59798046e+08], [5.10917558e+08, 5.10917558e+08], [5.73176915e+08, 5.73176915e+08]], [[2.58573945e+08, 2.58573945e+08], [5.09382251e+08, 5.09382251e+08], [5.71253676e+08, 5.71253676e+08]], [[2.57354887e+08, 2.57354887e+08], [5.07851527e+08, 5.07851527e+08], [5.69337080e+08, 5.69337080e+08]]])
<xarray.DatasetView> Size: 44kB Dimensions: (sarCalibrationType: 3, pole: 2, pixel: 786) Coordinates: * sarCalibrationType (sarCalibrationType) <U12 144B 'Beta Nought' ... 'Sig... * pole (pole) <U2 16B 'HH' 'HV' * pixel (pixel) int64 6kB -14 9 32 55 ... 17995 18018 18041 Data variables: lookup_tables (pixel, sarCalibrationType, pole) float64 38kB 2.731e...lookupTables- pole: 2
- sarCalibrationType: 3
- pixel: 786
- sarCalibrationType(sarCalibrationType)<U12'Beta Nought' ... 'Sigma Nought'
array(['Beta Nought', 'Gamma', 'Sigma Nought'], dtype='<U12')
- pixelFirstNoiseValue()int6418041
array(18041)
- stepSize()int64-23
array(-23)
- pole(pole)<U2'HH' 'HV'
array(['HH', 'HV'], dtype='<U2')
- pixel(pixel)int64-14 9 32 55 ... 17995 18018 18041
array([ -14, 9, 32, ..., 17995, 18018, 18041])
- noiseLevelValues(pole, sarCalibrationType, pixel)float64-33.18 -33.25 ... -33.86 -33.6
- units :
- dB
array([[[-33.18246722, -33.25351197, -33.32550201, ..., -30.89473432, -30.61496587, -30.3483882 ], [-32.27326558, -32.34783499, -32.42335129, ..., -33.8318838 , -33.55955633, -33.30043163], [-34.28025818, -34.35270257, -34.42609398, ..., -34.33126243, -34.05740833, -33.7967587 ]], [[-32.91420891, -32.9848524 , -33.05643046, ..., -30.69766432, -30.41789288, -30.15131232], [-32.00500727, -32.07917543, -32.15427974, ..., -33.6348138 , -33.36248334, -33.10335575], [-34.01199987, -34.084043 , -34.15702243, ..., -34.13419243, -33.86033534, -33.59968282]]])
- numberOfValues :
- 786
<xarray.DatasetView> Size: 44kB Dimensions: (pole: 2, sarCalibrationType: 3, pixel: 786) Coordinates: * sarCalibrationType (sarCalibrationType) <U12 144B 'Beta Nought' ... 'S... pixelFirstNoiseValue int64 8B 18041 stepSize int64 8B -23 * pole (pole) <U2 16B 'HH' 'HV' * pixel (pixel) int64 6kB -14 9 32 55 ... 17995 18018 18041 Data variables: noiseLevelValues (pole, sarCalibrationType, pixel) float64 38kB -33.... Attributes: numberOfValues: 786referenceNoiseLevel- pole: 2
- beam: 8
- sarCalibrationType: 3
- coefficients: 797
- beam(beam)object'SC-10' 'SC-3' ... 'SC-8' 'SC-9'
array(['SC-10', 'SC-3', 'SC-4', 'SC-5', 'SC-6', 'SC-7', 'SC-8', 'SC-9'], dtype=object) - sarCalibrationType(sarCalibrationType)object'Beta Nought' ... 'Sigma Nought'
array(['Beta Nought', 'Gamma', 'Sigma Nought'], dtype=object)
- pixelFirstNoiseValue(beam)int642408 18041 15757 ... 9088 6861 4634
array([ 2408, 18041, 15757, 13533, 11310, 9088, 6861, 4634])
- stepSize(beam)int64-4 -3 -3 -3 -3 -3 -3 -3
array([-4, -3, -3, -3, -3, -3, -3, -3])
- pole(pole)<U2'HH' 'HV'
array(['HH', 'HV'], dtype='<U2')
- noiseLevelValues(pole, beam, sarCalibrationType, coefficients)float64-31.46 -31.49 -31.52 ... nan nan
- units :
- dB
array([[[[-31.46339334, -31.49003467, -31.51684044, ..., nan, nan, nan], [-30.93686837, -30.96285726, -30.98901066, ..., nan, nan, nan], [-32.72120045, -32.74755494, -32.77407395, ..., nan, nan, nan]], [[-30.3483882 , -30.38224518, -30.41636818, ..., -31.8303057 , -31.81202785, -31.79380117], [-33.30043163, -33.3333158 , -33.3664662 , ..., -34.06755318, -34.04844026, -34.0293786 ], [-33.7967587 , -33.82984168, -33.86319092, ..., -34.7302976 , -34.71140435, -34.69256239]], [[-30.06133478, -30.09067221, -30.12020916, ..., nan, nan, nan], [-32.32594267, -32.35444018, -32.38313738, ..., nan, nan, nan], [-32.98152388, -33.0102403 , -33.03915643, ..., nan, nan, nan]], ... [[-29.63826662, -29.66844506, -29.69883467, ..., nan, nan, nan], [-30.32265223, -30.35222102, -30.38200105, ..., nan, nan, nan], [-31.51246088, -31.54228687, -31.57232411, ..., nan, nan, nan]], [[-30.30858914, -30.33934748, -30.37032521, ..., nan, nan, nan], [-30.55881211, -30.58900881, -30.61942497, ..., nan, nan, nan], [-31.94245282, -31.9729142 , -32.00359504, ..., nan, nan, nan]], [[-30.68286568, -30.70477002, -30.72678541, ..., nan, nan, nan], [-30.53126224, -30.55264442, -30.57413769, ..., nan, nan, nan], [-32.11353671, -32.1351891 , -32.15695259, ..., nan, nan, nan]]]])
<xarray.DatasetView> Size: 306kB Dimensions: (pole: 2, beam: 8, sarCalibrationType: 3, coefficients: 797) Coordinates: * beam (beam) object 64B 'SC-10' 'SC-3' ... 'SC-8' 'SC-9' * sarCalibrationType (sarCalibrationType) object 24B 'Beta Nought' ... '... pixelFirstNoiseValue (beam) int64 64B 2408 18041 15757 ... 9088 6861 4634 stepSize (beam) int64 64B -4 -3 -3 -3 -3 -3 -3 -3 * pole (pole) <U2 16B 'HH' 'HV' Dimensions without coordinates: coefficients Data variables: noiseLevelValues (pole, beam, sarCalibrationType, coefficients) float64 306kB ...perBeamReferenceNoiseLevel- pole: 2
- beam: 8
- coefficients: 503
- beam(beam)object'SC-10' 'SC-3' ... 'SC-8' 'SC-9'
array(['SC-10', 'SC-3', 'SC-4', 'SC-5', 'SC-6', 'SC-7', 'SC-8', 'SC-9'], dtype=object) - stepSize()int641
array(1)
- pole(pole)<U2'HH' 'HV'
array(['HH', 'HV'], dtype='<U2')
- noiseLevelScalingValues(pole, beam, coefficients)float6418.03 17.83 17.62 ... 20.19 20.41
- units :
- dB
array([[[18.03259361, 17.82567267, 17.61875174, ..., 17.97887603, 18.18579697, 18.39271791], [45.45929328, 44.50603098, 43.55276869, ..., 45.2988543 , 46.25211659, 47.20537889], [37.51680432, 36.7940541 , 36.29863671, ..., 37.3270023 , 38.24842871, 39.16985513], ..., [25.36641984, 25.05976688, 24.75311392, ..., 25.43286163, 25.73951459, nan], [22.51885011, 22.22411439, 21.96542158, ..., 22.32120948, 22.6159452 , 22.91068092], [20.29084046, 20.07540805, 19.85997565, ..., 19.97516162, 20.19059403, 20.40602643]], [[18.03290657, 17.82598119, 17.6190558 , ..., 17.97918783, 18.18611322, 18.39303861], [45.45929328, 44.50603098, 43.55276869, ..., 45.2988543 , 46.25211659, 47.20537889], [37.51680432, 36.7940541 , 36.29863671, ..., 37.3270023 , 38.24842871, 39.16985513], ..., [25.36641984, 25.05976688, 24.75311392, ..., 25.43286163, 25.73951459, nan], [22.51885011, 22.22411439, 21.96542158, ..., 22.32120948, 22.6159452 , 22.91068092], [20.29084046, 20.07540805, 19.85997565, ..., 19.97516162, 20.19059403, 20.40602643]]])
<xarray.DatasetView> Size: 64kB Dimensions: (pole: 2, beam: 8, coefficients: 503) Coordinates: * beam (beam) object 64B 'SC-10' 'SC-3' ... 'SC-8' 'SC-9' stepSize int64 8B 1 * pole (pole) <U2 16B 'HH' 'HV' Dimensions without coordinates: coefficients Data variables: noiseLevelScalingValues (pole, beam, coefficients) float64 64kB 18.03 .....azimuthNoiseLevelScaling
<xarray.DatasetView> Size: 0B Dimensions: () Data variables: *empty*noiseLevels
<xarray.DatasetView> Size: 0B Dimensions: () Data variables: *empty*lookupTables- pole: 2
- band: 1
- y: 19127
- x: 18042
- band(band)int641
array([1])
- spatial_ref()int640
- crs_wkt :
- GEOGCS["WGS 84",DATUM["WGS_1984",SPHEROID["WGS 84",6378137,298.257223563,AUTHORITY["EPSG","7030"]],AUTHORITY["EPSG","6326"]],PRIMEM["Greenwich",0,AUTHORITY["EPSG","8901"]],UNIT["degree",0.0174532925199433,AUTHORITY["EPSG","9122"]],AXIS["Latitude",NORTH],AXIS["Longitude",EAST],AUTHORITY["EPSG","4326"]]
- semi_major_axis :
- 6378137.0
- semi_minor_axis :
- 6356752.314245179
- inverse_flattening :
- 298.257223563
- reference_ellipsoid_name :
- WGS 84
- longitude_of_prime_meridian :
- 0.0
- prime_meridian_name :
- Greenwich
- geographic_crs_name :
- WGS 84
- horizontal_datum_name :
- World Geodetic System 1984
- grid_mapping_name :
- latitude_longitude
- spatial_ref :
- GEOGCS["WGS 84",DATUM["WGS_1984",SPHEROID["WGS 84",6378137,298.257223563,AUTHORITY["EPSG","7030"]],AUTHORITY["EPSG","6326"]],PRIMEM["Greenwich",0,AUTHORITY["EPSG","8901"]],UNIT["degree",0.0174532925199433,AUTHORITY["EPSG","9122"]],AXIS["Latitude",NORTH],AXIS["Longitude",EAST],AUTHORITY["EPSG","4326"]]
- GeoTransform :
- 0.0 1.0 0.0 0.0 0.0 1.0
- gcps :
- {"type": "FeatureCollection", "features": [{"type": "Feature", "properties": {"id": "1", "info": "", "row": 0.5, "col": 0.5}, "geometry": {"type": "Point", "coordinates": [-89.49513011173734, 49.257845406661716, 229.9309956651041]}}, {"type": "Feature", "properties": {"id": "2", "info": "", "row": 0.5, "col": 1503.9166259765625}, "geometry": {"type": "Point", "coordinates": [-89.08619582162856, 49.22049274976272, 229.9309956651041]}}, {"type": "Feature", "properties": {"id": "3", "info": "", "row": 0.5, "col": 3007.333251953125}, "geometry": {"type": "Point", "coordinates": [-88.67788853140567, 49.18169682175015, 229.9309956651041]}}, {"type": "Feature", "properties": {"id": "4", "info": "", "row": 0.5, "col": 4510.75}, "geometry": {"type": "Point", "coordinates": [-88.27023034008236, 49.14146183950849, 229.9309956651041]}}, {"type": "Feature", "properties": {"id": "5", "info": "", "row": 0.5, "col": 6014.16650390625}, "geometry": {"type": "Point", "coordinates": [-87.86324307026494, 49.09979216257854, 229.9309956651041]}}, {"type": "Feature", "properties": {"id": "6", "info": "", "row": 0.5, "col": 7517.5830078125}, "geometry": {"type": "Point", "coordinates": [-87.45694746967007, 49.056692205575004, 229.9309956651041]}}, {"type": "Feature", "properties": {"id": "7", "info": "", "row": 0.5, "col": 9021.0}, "geometry": {"type": "Point", "coordinates": [-87.05136479004186, 49.01216659833742, 229.9309956651041]}}, {"type": "Feature", "properties": {"id": "8", "info": "", "row": 0.5, "col": 10524.4169921875}, "geometry": {"type": "Point", "coordinates": [-86.64651572236808, 48.966220076295635, 229.9309956651041]}}, {"type": "Feature", "properties": {"id": "9", "info": "", "row": 0.5, "col": 12027.833984375}, "geometry": {"type": "Point", "coordinates": [-86.24242065497792, 48.91885750474096, 229.9309956651041]}}, {"type": "Feature", "properties": {"id": "10", "info": "", "row": 0.5, "col": 13531.2509765625}, "geometry": {"type": "Point", "coordinates": [-85.8390996671337, 48.870083876426314, 229.9309956651041]}}, {"type": "Feature", "properties": {"id": "11", "info": "", "row": 0.5, "col": 15034.66796875}, "geometry": {"type": "Point", "coordinates": [-85.43657252298104, 48.81990430912944, 229.9309956651041]}}, {"type": "Feature", "properties": {"id": "12", "info": "", "row": 0.5, "col": 16538.083984375}, "geometry": {"type": "Point", "coordinates": [-85.03485892671077, 48.76832407716551, 229.9309956651041]}}, {"type": "Feature", "properties": {"id": "13", "info": "", "row": 0.5, "col": 18041.5}, "geometry": {"type": "Point", "coordinates": [-84.63397773377159, 48.71534850877886, 229.9309956651041]}}, {"type": "Feature", "properties": {"id": "14", "info": "", "row": 1594.3333740234375, "col": 0.5}, "geometry": {"type": "Point", "coordinates": [-89.5557630605347, 48.97494951923606, 229.9309956651041]}}, {"type": "Feature", "properties": {"id": "15", "info": "", "row": 1594.3333740234375, "col": 1503.9166259765625}, "geometry": {"type": "Point", "coordinates": [-89.14915607270999, 48.937549400122954, 229.9309956651041]}}, {"type": "Feature", "properties": {"id": "16", "info": "", "row": 1594.3333740234375, "col": 3007.333251953125}, "geometry": {"type": "Point", "coordinates": [-88.74316695698685, 48.898720322899095, 229.9309956651041]}}, {"type": "Feature", "properties": {"id": "17", "info": "", "row": 1594.3333740234375, "col": 4510.75}, "geometry": {"type": "Point", "coordinates": [-88.33781724713606, 48.85846644141123, 229.9309956651041]}}, {"type": "Feature", "properties": {"id": "18", "info": "", "row": 1594.3333740234375, "col": 6014.16650390625}, "geometry": {"type": "Point", "coordinates": [-87.93312820881941, 48.81679204849093, 229.9309956651041]}}, {"type": "Feature", "properties": {"id": "19", "info": "", "row": 1594.3333740234375, "col": 7517.5830078125}, "geometry": {"type": "Point", "coordinates": [-87.52912004618346, 48.77370148850655, 229.9309956651041]}}, {"type": "Feature", "properties": {"id": "20", "info": "", "row": 1594.3333740234375, "col": 9021.0}, "geometry": {"type": "Point", "coordinates": [-87.12581347184977, 48.729199317578235, 229.9309956651041]}}, {"type": "Feature", "properties": {"id": "21", "info": "", "row": 1594.3333740234375, "col": 10524.4169921875}, "geometry": {"type": "Point", "coordinates": [-86.72322864844088, 48.68329019400043, 229.9309956651041]}}, {"type": "Feature", "properties": {"id": "22", "info": "", "row": 1594.3333740234375, "col": 12027.833984375}, "geometry": {"type": "Point", "coordinates": [-86.32138544565176, 48.635978902620465, 229.9309956651041]}}, {"type": "Feature", "properties": {"id": "23", "info": "", "row": 1594.3333740234375, "col": 13531.2509765625}, "geometry": {"type": "Point", "coordinates": [-85.92030343385981, 48.58727035249082, 229.9309956651041]}}, {"type": "Feature", "properties": {"id": "24", "info": "", "row": 1594.3333740234375, "col": 15034.66796875}, "geometry": {"type": "Point", "coordinates": [-85.52000187833313, 48.537169574513015, 229.9309956651041]}}, {"type": "Feature", "properties": {"id": "25", "info": "", "row": 1594.3333740234375, "col": 16538.083984375}, "geometry": {"type": "Point", "coordinates": [-85.12049999353934, 48.48568175301253, 229.9309956651041]}}, {"type": "Feature", "properties": {"id": "26", "info": "", "row": 1594.3333740234375, "col": 18041.5}, "geometry": {"type": "Point", "coordinates": [-84.72181615839237, 48.432812123328425, 229.9309956651041]}}, {"type": "Feature", "properties": {"id": "27", "info": "", "row": 3188.166748046875, "col": 0.5}, "geometry": {"type": "Point", "coordinates": [-89.61614106487791, 48.692030274166925, 229.9309956651041]}}, {"type": "Feature", "properties": {"id": "28", "info": "", "row": 3188.166748046875, "col": 1503.9166259765625}, "geometry": {"type": "Point", "coordinates": [-89.21182574759585, 48.654581351298354, 229.9309956651041]}}, {"type": "Feature", "properties": {"id": "29", "info": "", "row": 3188.166748046875, "col": 3007.333251953125}, "geometry": {"type": "Point", "coordinates": [-88.8081193709017, 48.615717625234296, 229.9309956651041]}}, {"type": "Feature", "properties": {"id": "30", "info": "", "row": 3188.166748046875, "col": 4510.75}, "geometry": {"type": "Point", "coordinates": [-88.40504291917289, 48.57544318822219, 229.9309956651041]}}, {"type": "Feature", "properties": {"id": "31", "info": "", "row": 3188.166748046875, "col": 6014.16650390625}, "geometry": {"type": "Point", "coordinates": [-88.0026171168734, 48.5337622679485, 229.9309956651041]}}, {"type": "Feature", "properties": {"id": "32", "info": "", "row": 3188.166748046875, "col": 7517.5830078125}, "geometry": {"type": "Point", "coordinates": [-87.60086163968268, 48.490679140172645, 229.9309956651041]}}, {"type": "Feature", "properties": {"id": "33", "info": "", "row": 3188.166748046875, "col": 9021.0}, "geometry": {"type": "Point", "coordinates": [-87.19979667606997, 48.446198289048965, 229.9309956651041]}}, {"type": "Feature", "properties": {"id": "34", "info": "", "row": 3188.166748046875, "col": 10524.4169921875}, "geometry": {"type": "Point", "coordinates": [-86.79944187497046, 48.4003242975949, 229.9309956651041]}}, {"type": "Feature", "properties": {"id": "35", "info": "", "row": 3188.166748046875, "col": 12027.833984375}, "geometry": {"type": "Point", "coordinates": [-86.39981660155264, 48.353061872142185, 229.9309956651041]}}, {"type": "Feature", "properties": {"id": "36", "info": "", "row": 3188.166748046875, "col": 13531.2509765625}, "geometry": {"type": "Point", "coordinates": [-86.00093993117915, 48.30441584007641, 229.9309956651041]}}, {"type": "Feature", "properties": {"id": "37", "info": "", "row": 3188.166748046875, "col": 15034.66796875}, "geometry": {"type": "Point", "coordinates": [-85.60283064385914, 48.254391147560696, 229.9309956651041]}}, {"type": "Feature", "properties": {"id": "38", "info": "", "row": 3188.166748046875, "col": 16538.083984375}, "geometry": {"type": "Point", "coordinates": [-85.20550747720297, 48.20299289110697, 229.9309956651041]}}, {"type": "Feature", "properties": {"id": "39", "info": "", "row": 3188.166748046875, "col": 18041.5}, "geometry": {"type": "Point", "coordinates": [-84.8089883463828, 48.15022621544867, 229.9309956651041]}}, {"type": "Feature", "properties": {"id": "40", "info": "", "row": 4782.0, "col": 0.5}, "geometry": {"type": "Point", "coordinates": [-89.67627021453514, 48.40908777748061, 229.9309956651041]}}, {"type": "Feature", "properties": {"id": "41", "info": "", "row": 4782.0, "col": 1503.9166259765625}, "geometry": {"type": "Point", "coordinates": [-89.27421163413045, 48.37158873824278, 229.9309956651041]}}, {"type": "Feature", "properties": {"id": "42", "info": "", "row": 4782.0, "col": 3007.333251953125}, "geometry": {"type": "Point", "coordinates": [-88.8727532528803, 48.33268889588749, 229.9309956651041]}}, {"type": "Feature", "properties": {"id": "43", "info": "", "row": 4782.0, "col": 4510.75}, "geometry": {"type": "Point", "coordinates": [-88.4719155211201, 48.29239228246066, 229.9309956651041]}}, {"type": "Feature", "properties": {"id": "44", "info": "", "row": 4782.0, "col": 6014.16650390625}, "geometry": {"type": "Point", "coordinates": [-88.07171863727166, 48.2507030620134, 229.9309956651041]}}, {"type": "Feature", "properties": {"id": "45", "info": "", "row": 4782.0, "col": 7517.5830078125}, "geometry": {"type": "Point", "coordinates": [-87.67218176318195, 48.20762544328599, 229.9309956651041]}}, {"type": "Feature", "properties": {"id": "46", "info": "", "row": 4782.0, "col": 9021.0}, "geometry": {"type": "Point", "coordinates": [-87.27332457765132, 48.16316384016692, 229.9309956651041]}}, {"type": "Feature", "properties": {"id": "47", "info": "", "row": 4782.0, "col": 10524.4169921875}, "geometry": {"type": "Point", "coordinates": [-86.87516623008932, 48.11732276219317, 229.9309956651041]}}, {"type": "Feature", "properties": {"id": "48", "info": "", "row": 4782.0, "col": 12027.833984375}, "geometry": {"type": "Point", "coordinates": [-86.47772559482482, 48.070106839052826, 229.9309956651041]}}, {"type": "Feature", "properties": {"id": "49", "info": "", "row": 4782.0, "col": 13531.2509765625}, "geometry": {"type": "Point", "coordinates": [-86.0810212656256, 48.02152081843423, 229.9309956651041]}}, {"type": "Feature", "properties": {"id": "50", "info": "", "row": 4782.0, "col": 15034.66796875}, "geometry": {"type": "Point", "coordinates": [-85.68507155037685, 47.97156956382683, 229.9309956651041]}}, {"type": "Feature", "properties": {"id": "51", "info": "", "row": 4782.0, "col": 16538.083984375}, "geometry": {"type": "Point", "coordinates": [-85.28989472239256, 47.920258086049245, 229.9309956651041]}}, {"type": "Feature", "properties": {"id": "52", "info": "", "row": 4782.0, "col": 18041.5}, "geometry": {"type": "Point", "coordinates": [-84.89550824540235, 47.86759144144497, 229.9309956651041]}}, {"type": "Feature", "properties": {"id": "53", "info": "", "row": 6375.83349609375, "col": 0.5}, "geometry": {"type": "Point", "coordinates": [-89.73615646401348, 48.12612204921231, 229.9309956651041]}}, {"type": "Feature", "properties": {"id": "54", "info": "", "row": 6375.83349609375, "col": 1503.9166259765625}, "geometry": {"type": "Point", "coordinates": [-89.33632036676826, 48.088571609040734, 229.9309956651041]}}, {"type": "Feature", "properties": {"id": "55", "info": "", "row": 6375.83349609375, "col": 3007.333251953125}, "geometry": {"type": "Point", "coordinates": [-88.93707591138033, 48.049634214163405, 229.9309956651041]}}, {"type": "Feature", "properties": {"id": "56", "info": "", "row": 6375.83349609375, "col": 4510.75}, "geometry": {"type": "Point", "coordinates": [-88.53844302912724, 48.00931383779501, 229.9309956651041]}}, {"type": "Feature", "properties": {"id": "57", "info": "", "row": 6375.83349609375, "col": 6014.16650390625}, "geometry": {"type": "Point", "coordinates": [-88.14044140670177, 47.96761458178061, 229.9309956651041]}}, {"type": "Feature", "properties": {"id": "58", "info": "", "row": 6375.83349609375, "col": 7517.5830078125}, "geometry": {"type": "Point", "coordinates": [-87.74308970656433, 47.92454058941275, 229.9309956651041]}}, {"type": "Feature", "properties": {"id": "59", "info": "", "row": 6375.83349609375, "col": 9021.0}, "geometry": {"type": "Point", "coordinates": [-87.34640711179964, 47.880096205956484, 229.9309956651041]}}, {"type": "Feature", "properties": {"id": "60", "info": "", "row": 6375.83349609375, "col": 10524.4169921875}, "geometry": {"type": "Point", "coordinates": [-86.95041228574884, 47.83428586918124, 229.9309956651041]}}, {"type": "Feature", "properties": {"id": "61", "info": "", "row": 6375.83349609375, "col": 12027.833984375}, "geometry": {"type": "Point", "coordinates": [-86.55512362543597, 47.78711413397857, 229.9309956651041]}}, {"type": "Feature", "properties": {"id": "62", "info": "", "row": 6375.83349609375, "col": 13531.2509765625}, "geometry": {"type": "Point", "coordinates": [-86.16055925602365, 47.7385856702489, 229.9309956651041]}}, {"type": "Feature", "properties": {"id": "63", "info": "", "row": 6375.83349609375, "col": 15034.66796875}, "geometry": {"type": "Point", "coordinates": [-85.76673702564094, 47.68870526076462, 229.9309956651041]}}, {"type": "Feature", "properties": {"id": "64", "info": "", "row": 6375.83349609375, "col": 16538.083984375}, "geometry": {"type": "Point", "coordinates": [-85.37367475601741, 47.63747783277454, 229.9309956651041]}}, {"type": "Feature", "properties": {"id": "65", "info": "", "row": 6375.83349609375, "col": 18041.5}, "geometry": {"type": "Point", "coordinates": [-84.98138947116806, 47.584908356356244, 229.9309956651041]}}, {"type": "Feature", "properties": {"id": "66", "info": "", "row": 7969.6669921875, "col": 0.5}, "geometry": {"type": "Point", "coordinates": [-89.79580559777784, 47.84313321473812, 229.9309956651041]}}, {"type": "Feature", "properties": {"id": "67", "info": "", "row": 7969.6669921875, "col": 1503.9166259765625}, "geometry": {"type": "Point", "coordinates": [-89.39815839107621, 47.80553011651249, 229.9309956651041]}}, {"type": "Feature", "properties": {"id": "68", "info": "", "row": 7969.6669921875, "col": 3007.333251953125}, "geometry": {"type": "Point", "coordinates": [-89.00109444732907, 47.76655376340877, 229.9309956651041]}}, {"type": "Feature", "properties": {"id": "69", "info": "", "row": 7969.6669921875, "col": 4510.75}, "geometry": {"type": "Point", "coordinates": [-88.60463319304549, 47.72620807111928, 229.9309956651041]}}, {"type": "Feature", "properties": {"id": "70", "info": "", "row": 7969.6669921875, "col": 6014.16650390625}, "geometry": {"type": "Point", "coordinates": [-88.2087938174399, 47.684497080710045, 229.9309956651041]}}, {"type": "Feature", "properties": {"id": "71", "info": "", "row": 7969.6669921875, "col": 7517.5830078125}, "geometry": {"type": "Point", "coordinates": [-87.81359449724683, 47.64142487151747, 229.9309956651041]}}, {"type": "Feature", "properties": {"id": "72", "info": "", "row": 7969.6669921875, "col": 9021.0}, "geometry": {"type": "Point", "coordinates": [-87.4190539333511, 47.59699572177605, 229.9309956651041]}}, {"type": "Feature", "properties": {"id": "73", "info": "", "row": 7969.6669921875, "col": 10524.4169921875}, "geometry": {"type": "Point", "coordinates": [-87.02519031633258, 47.55121399918047, 229.9309956651041]}}, {"type": "Feature", "properties": {"id": "74", "info": "", "row": 7969.6669921875, "col": 12027.833984375}, "geometry": {"type": "Point", "coordinates": [-86.63202157872571, 47.504084185583395, 229.9309956651041]}}, {"type": "Feature", "properties": {"id": "75", "info": "", "row": 7969.6669921875, "col": 13531.2509765625}, "geometry": {"type": "Point", "coordinates": [-86.23956538962527, 47.455610874942074, 229.9309956651041]}}, {"type": "Feature", "properties": {"id": "76", "info": "", "row": 7969.6669921875, "col": 15034.66796875}, "geometry": {"type": "Point", "coordinates": [-85.84783914976485, 47.40579877125552, 229.9309956651041]}}, {"type": "Feature", "properties": {"id": "77", "info": "", "row": 7969.6669921875, "col": 16538.083984375}, "geometry": {"type": "Point", "coordinates": [-85.45686024105811, 47.35465272019128, 229.9309956651041]}}, {"type": "Feature", "properties": {"id": "78", "info": "", "row": 7969.6669921875, "col": 18041.5}, "geometry": {"type": "Point", "coordinates": [-85.0666452593968, 47.302177607646755, 229.9309956651041]}}, {"type": "Feature", "properties": {"id": "79", "info": "", "row": 9563.5, "col": 0.5}, "geometry": {"type": "Point", "coordinates": [-89.85522324851848, 47.56012144121747, 229.9309956651041]}}, {"type": "Feature", "properties": {"id": "80", "info": "", "row": 9563.5, "col": 1503.9166259765625}, "geometry": {"type": "Point", "coordinates": [-89.45973198287543, 47.52246445457544, 229.9309956651041]}}, {"type": "Feature", "properties": {"id": "81", "info": "", "row": 9563.5, "col": 3007.333251953125}, "geometry": {"type": "Point", "coordinates": [-89.0648157741613, 47.48344776730025, 229.9309956651041]}}, {"type": "Feature", "properties": {"id": "82", "info": "", "row": 9563.5, "col": 4510.75}, "geometry": {"type": "Point", "coordinates": [-88.67049355795073, 47.44307523883301, 229.9309956651041]}}, {"type": "Feature", "properties": {"id": "83", "info": "", "row": 9563.5, "col": 6014.16650390625}, "geometry": {"type": "Point", "coordinates": [-88.27678403974781, 47.40135085084368, 229.9309956651041]}}, {"type": "Feature", "properties": {"id": "84", "info": "", "row": 9563.5, "col": 7517.5830078125}, "geometry": {"type": "Point", "coordinates": [-87.8837049237573, 47.358278620156725, 229.9309956651041]}}, {"type": "Feature", "properties": {"id": "85", "info": "", "row": 9563.5, "col": 9021.0}, "geometry": {"type": "Point", "coordinates": [-87.49127444178403, 47.31386275952505, 229.9309956651041]}}, {"type": "Feature", "properties": {"id": "86", "info": "", "row": 9563.5, "col": 10524.4169921875}, "geometry": {"type": "Point", "coordinates": [-87.09951032451309, 47.268107568208634, 229.9309956651041]}}, {"type": "Feature", "properties": {"id": "87", "info": "", "row": 9563.5, "col": 12027.833984375}, "geometry": {"type": "Point", "coordinates": [-86.70843005235145, 47.22101745671998, 229.9309956651041]}}, {"type": "Feature", "properties": {"id": "88", "info": "", "row": 9563.5, "col": 13531.2509765625}, "geometry": {"type": "Point", "coordinates": [-86.3180508505202, 47.172596944867436, 229.9309956651041]}}, {"type": "Feature", "properties": {"id": "89", "info": "", "row": 9563.5, "col": 15034.66796875}, "geometry": {"type": "Point", "coordinates": [-85.92838968434494, 47.12285065976317, 229.9309956651041]}}, {"type": "Feature", "properties": {"id": "90", "info": "", "row": 9563.5, "col": 16538.083984375}, "geometry": {"type": "Point", "coordinates": [-85.53946350722609, 47.071783367407555, 229.9309956651041]}}, {"type": "Feature", "properties": {"id": "91", "info": "", "row": 9563.5, "col": 18041.5}, "geometry": {"type": "Point", "coordinates": [-85.15128849825683, 47.019399871551144, 229.9309956651041]}}, {"type": "Feature", "properties": {"id": "92", "info": "", "row": 11157.3330078125, "col": 0.5}, "geometry": {"type": "Point", "coordinates": [-89.91441494721865, 47.27708672338609, 229.9309956651041]}}, {"type": "Feature", "properties": {"id": "93", "info": "", "row": 11157.3330078125, "col": 1503.9166259765625}, "geometry": {"type": "Point", "coordinates": [-89.52104730054543, 47.239374643903375, 229.9309956651041]}}, {"type": "Feature", "properties": {"id": "94", "info": "", "row": 11157.3330078125, "col": 3007.333251953125}, "geometry": {"type": "Point", "coordinates": [-89.12824667233033, 47.200316275381454, 229.9309956651041]}}, {"type": "Feature", "properties": {"id": "95", "info": "", "row": 11157.3330078125, "col": 4510.75}, "geometry": {"type": "Point", "coordinates": [-88.73603152078223, 47.159915422263204, 229.9309956651041]}}, {"type": "Feature", "properties": {"id": "96", "info": "", "row": 11157.3330078125, "col": 6014.16650390625}, "geometry": {"type": "Point", "coordinates": [-88.34442008065452, 47.118176008127335, 229.9309956651041]}}, {"type": "Feature", "properties": {"id": "97", "info": "", "row": 11157.3330078125, "col": 7517.5830078125}, "geometry": {"type": "Point", "coordinates": [-87.95342959667182, 47.07510198871667, 229.9309956651041]}}, {"type": "Feature", "properties": {"id": "98", "info": "", "row": 11157.3330078125, "col": 9021.0}, "geometry": {"type": "Point", "coordinates": [-87.56307784421283, 47.03069751280094, 229.9309956651041]}}, {"type": "Feature", "properties": {"id": "99", "info": "", "row": 11157.3330078125, "col": 10524.4169921875}, "geometry": {"type": "Point", "coordinates": [-87.17338210628769, 46.9849668127686, 229.9309956651041]}}, {"type": "Feature", "properties": {"id": "100", "info": "", "row": 11157.3330078125, "col": 12027.833984375}, "geometry": {"type": "Point", "coordinates": [-86.78435942343266, 46.93791422947208, 229.9309956651041]}}, {"type": "Feature", "properties": {"id": "101", "info": "", "row": 11157.3330078125, "col": 13531.2509765625}, "geometry": {"type": "Point", "coordinates": [-86.39602658877897, 46.889544210308806, 229.9309956651041]}}, {"type": "Feature", "properties": {"id": "102", "info": "", "row": 11157.3330078125, "col": 15034.66796875}, "geometry": {"type": "Point", "coordinates": [-86.00840014351509, 46.8398613072893, 229.9309956651041]}}, {"type": "Feature", "properties": {"id": "103", "info": "", "row": 11157.3330078125, "col": 16538.083984375}, "geometry": {"type": "Point", "coordinates": [-85.62149662408399, 46.78887020868021, 229.9309956651041]}}, {"type": "Feature", "properties": {"id": "104", "info": "", "row": 11157.3330078125, "col": 18041.5}, "geometry": {"type": "Point", "coordinates": [-85.23533180336632, 46.73657563800635, 229.9309956651041]}}, {"type": "Feature", "properties": {"id": "105", "info": "", "row": 12751.166015625, "col": 0.5}, "geometry": {"type": "Point", "coordinates": [-89.97338607242057, 46.994029143898544, 229.9309956651041]}}, {"type": "Feature", "properties": {"id": "106", "info": "", "row": 12751.166015625, "col": 1503.9166259765625}, "geometry": {"type": "Point", "coordinates": [-89.582110333078, 46.95626079235165, 229.9309956651041]}}, {"type": "Feature", "properties": {"id": "107", "info": "", "row": 12751.166015625, "col": 3007.333251953125}, "geometry": {"type": "Point", "coordinates": [-89.1913937361834, 46.91715942356583, 229.9309956651041]}}, {"type": "Feature", "properties": {"id": "108", "info": "", "row": 12751.166015625, "col": 4510.75}, "geometry": {"type": "Point", "coordinates": [-88.80125427546865, 46.87672878817727, 229.9309956651041]}}, {"type": "Feature", "properties": {"id": "109", "info": "", "row": 12751.166015625, "col": 6014.16650390625}, "geometry": {"type": "Point", "coordinates": [-88.41170972789966, 46.83497275298305, 229.9309956651041]}}, {"type": "Feature", "properties": {"id": "110", "info": "", "row": 12751.166015625, "col": 7517.5830078125}, "geometry": {"type": "Point", "coordinates": [-88.02277689104079, 46.79189521399975, 229.9309956651041]}}, {"type": "Feature", "properties": {"id": "111", "info": "", "row": 12751.166015625, "col": 9021.0}, "geometry": {"type": "Point", "coordinates": [-87.63447309611503, 46.747500257468936, 229.9309956651041]}}, {"type": "Feature", "properties": {"id": "112", "info": "", "row": 12751.166015625, "col": 10524.4169921875}, "geometry": {"type": "Point", "coordinates": [-87.24681519056348, 46.70179205045544, 229.9309956651041]}}, {"type": "Feature", "properties": {"id": "113", "info": "", "row": 12751.166015625, "col": 12027.833984375}, "geometry": {"type": "Point", "coordinates": [-86.85981978662043, 46.65477486574659, 229.9309956651041]}}, {"type": "Feature", "properties": {"id": "114", "info": "", "row": 12751.166015625, "col": 13531.2509765625}, "geometry": {"type": "Point", "coordinates": [-86.47350325674142, 46.606453080012706, 229.9309956651041]}}, {"type": "Feature", "properties": {"id": "115", "info": "", "row": 12751.166015625, "col": 15034.66796875}, "geometry": {"type": "Point", "coordinates": [-86.08788172928614, 46.55683117194342, 229.9309956651041]}}, {"type": "Feature", "properties": {"id": "116", "info": "", "row": 12751.166015625, "col": 16538.083984375}, "geometry": {"type": "Point", "coordinates": [-85.7029713343012, 46.505913753863865, 229.9309956651041]}}, {"type": "Feature", "properties": {"id": "117", "info": "", "row": 12751.166015625, "col": 18041.5}, "geometry": {"type": "Point", "coordinates": [-85.31878744919753, 46.45370547099807, 229.9309956651041]}}, {"type": "Feature", "properties": {"id": "118", "info": "", "row": 14344.9990234375, "col": 0.5}, "geometry": {"type": "Point", "coordinates": [-90.03214187494162, 46.71094878028964, 229.9309956651041]}}, {"type": "Feature", "properties": {"id": "119", "info": "", "row": 14344.9990234375, "col": 1503.9166259765625}, "geometry": {"type": "Point", "coordinates": [-89.64292692568341, 46.67312300221596, 229.9309956651041]}}, {"type": "Feature", "properties": {"id": "120", "info": "", "row": 14344.9990234375, "col": 3007.333251953125}, "geometry": {"type": "Point", "coordinates": [-89.25426340036918, 46.633977341689885, 229.9309956651041]}}, {"type": "Feature", "properties": {"id": "121", "info": "", "row": 14344.9990234375, "col": 4510.75}, "geometry": {"type": "Point", "coordinates": [-88.86616884088764, 46.5935154967144, 229.9309956651041]}}, {"type": "Feature", "properties": {"id": "122", "info": "", "row": 14344.9990234375, "col": 6014.16650390625}, "geometry": {"type": "Point", "coordinates": [-88.47866057869717, 46.55174127854886, 229.9309956651041]}}, {"type": "Feature", "properties": {"id": "123", "info": "", "row": 14344.9990234375, "col": 7517.5830078125}, "geometry": {"type": "Point", "coordinates": [-88.091754976321, 46.508658524819346, 229.9309956651041]}}, {"type": "Feature", "properties": {"id": "124", "info": "", "row": 14344.9990234375, "col": 9021.0}, "geometry": {"type": "Point", "coordinates": [-87.70546893269315, 46.464271260650136, 229.9309956651041]}}, {"type": "Feature", "properties": {"id": "125", "info": "", "row": 14344.9990234375, "col": 10524.4169921875}, "geometry": {"type": "Point", "coordinates": [-87.31981887123385, 46.41858358926404, 229.9309956651041]}}, {"type": "Feature", "properties": {"id": "126", "info": "", "row": 14344.9990234375, "col": 12027.833984375}, "geometry": {"type": "Point", "coordinates": [-86.93482098726949, 46.37159971695216, 229.9309956651041]}}, {"type": "Feature", "properties": {"id": "127", "info": "", "row": 14344.9990234375, "col": 13531.2509765625}, "geometry": {"type": "Point", "coordinates": [-86.55049124364812, 46.32332395129328, 229.9309956651041]}}, {"type": "Feature", "properties": {"id": "128", "info": "", "row": 14344.9990234375, "col": 15034.66796875}, "geometry": {"type": "Point", "coordinates": [-86.16684536660847, 46.27376069935127, 229.9309956651041]}}, {"type": "Feature", "properties": {"id": "129", "info": "", "row": 14344.9990234375, "col": 16538.083984375}, "geometry": {"type": "Point", "coordinates": [-85.7838990904372, 46.22291449929959, 229.9309956651041]}}, {"type": "Feature", "properties": {"id": "130", "info": "", "row": 14344.9990234375, "col": 18041.5}, "geometry": {"type": "Point", "coordinates": [-85.40166740713923, 46.17078991988218, 229.9309956651041]}}, {"type": "Feature", "properties": {"id": "131", "info": "", "row": 15938.83203125, "col": 0.5}, "geometry": {"type": "Point", "coordinates": [-90.09068747999387, 46.42784571221911, 229.9309956651041]}}, {"type": "Feature", "properties": {"id": "132", "info": "", "row": 15938.83203125, "col": 1503.9166259765625}, "geometry": {"type": "Point", "coordinates": [-89.70350278259144, 46.38996137715728, 229.9309956651041]}}, {"type": "Feature", "properties": {"id": "133", "info": "", "row": 15938.83203125, "col": 3007.333251953125}, "geometry": {"type": "Point", "coordinates": [-89.31686194340853, 46.350770160131056, 229.9309956651041]}}, {"type": "Feature", "properties": {"id": "134", "info": "", "row": 15938.83203125, "col": 4510.75}, "geometry": {"type": "Point", "coordinates": [-88.9307820646948, 46.31027570764781, 229.9309956651041]}}, {"type": "Feature", "properties": {"id": "135", "info": "", "row": 15938.83203125, "col": 6014.16650390625}, "geometry": {"type": "Point", "coordinates": [-88.54528004430718, 46.268481776638666, 229.9309956651041]}}, {"type": "Feature", "properties": {"id": "136", "info": "", "row": 15938.83203125, "col": 7517.5830078125}, "geometry": {"type": "Point", "coordinates": [-88.16037182142642, 46.22539214763218, 229.9309956651041]}}, {"type": "Feature", "properties": {"id": "137", "info": "", "row": 15938.83203125, "col": 9021.0}, "geometry": {"type": "Point", "coordinates": [-87.77607387421193, 46.18101078600726, 229.9309956651041]}}, {"type": "Feature", "properties": {"id": "138", "info": "", "row": 15938.83203125, "col": 10524.4169921875}, "geometry": {"type": "Point", "coordinates": [-87.39240221326627, 46.135341732584564, 229.9309956651041]}}, {"type": "Feature", "properties": {"id": "139", "info": "", "row": 15938.83203125, "col": 12027.833984375}, "geometry": {"type": "Point", "coordinates": [-87.00937262800574, 46.08838912867669, 229.9309956651041]}}, {"type": "Feature", "properties": {"id": "140", "info": "", "row": 15938.83203125, "col": 13531.2509765625}, "geometry": {"type": "Point", "coordinates": [-86.62700068240585, 46.040157214358686, 229.9309956651041]}}, {"type": "Feature", "properties": {"id": "141", "info": "", "row": 15938.83203125, "col": 15034.66796875}, "geometry": {"type": "Point", "coordinates": [-86.2453017110104, 45.99065032671934, 229.9309956651041]}}, {"type": "Feature", "properties": {"id": "142", "info": "", "row": 15938.83203125, "col": 16538.083984375}, "geometry": {"type": "Point", "coordinates": [-85.86429106258637, 45.93987293150769, 229.9309956651041]}}, {"type": "Feature", "properties": {"id": "143", "info": "", "row": 15938.83203125, "col": 18041.5}, "geometry": {"type": "Point", "coordinates": [-85.48398335359182, 45.88782952276703, 229.9309956651041]}}, {"type": "Feature", "properties": {"id": "144", "info": "", "row": 17532.666015625, "col": 0.5}, "geometry": {"type": "Point", "coordinates": [-90.14902792826584, 46.144719847340845, 229.9309956651041]}}, {"type": "Feature", "properties": {"id": "145", "info": "", "row": 17532.666015625, "col": 1503.9166259765625}, "geometry": {"type": "Point", "coordinates": [-89.76384350981257, 46.10677584809723, 229.9309956651041]}}, {"type": "Feature", "properties": {"id": "146", "info": "", "row": 17532.666015625, "col": 3007.333251953125}, "geometry": {"type": "Point", "coordinates": [-89.37919553204247, 46.06753783573127, 229.9309956651041]}}, {"type": "Feature", "properties": {"id": "147", "info": "", "row": 17532.666015625, "col": 4510.75}, "geometry": {"type": "Point", "coordinates": [-88.99510066936692, 46.02700940635795, 229.9309956651041]}}, {"type": "Feature", "properties": {"id": "148", "info": "", "row": 17532.666015625, "col": 6014.16650390625}, "geometry": {"type": "Point", "coordinates": [-88.61157539759475, 45.9851942637574, 229.9309956651041]}}, {"type": "Feature", "properties": {"id": "149", "info": "", "row": 17532.666015625, "col": 7517.5830078125}, "geometry": {"type": "Point", "coordinates": [-88.22863524390556, 45.94209613261766, 229.9309956651041]}}, {"type": "Feature", "properties": {"id": "150", "info": "", "row": 17532.666015625, "col": 9021.0}, "geometry": {"type": "Point", "coordinates": [-87.8462962767996, 45.89771891989987, 229.9309956651041]}}, {"type": "Feature", "properties": {"id": "151", "info": "", "row": 17532.666015625, "col": 10524.4169921875}, "geometry": {"type": "Point", "coordinates": [-87.46457410492093, 45.85206660542065, 229.9309956651041]}}, {"type": "Feature", "properties": {"id": "152", "info": "", "row": 17532.666015625, "col": 12027.833984375}, "geometry": {"type": "Point", "coordinates": [-87.08348412245924, 45.805143266990356, 229.9309956651041]}}, {"type": "Feature", "properties": {"id": "153", "info": "", "row": 17532.666015625, "col": 13531.2509765625}, "geometry": {"type": "Point", "coordinates": [-86.7030415049006, 45.756953078718716, 229.9309956651041]}}, {"type": "Feature", "properties": {"id": "154", "info": "", "row": 17532.666015625, "col": 15034.66796875}, "geometry": {"type": "Point", "coordinates": [-86.32326120517968, 45.70750030931821, 229.9309956651041]}}, {"type": "Feature", "properties": {"id": "155", "info": "", "row": 17532.666015625, "col": 16538.083984375}, "geometry": {"type": "Point", "coordinates": [-85.94415819650965, 45.65678935379403, 229.9309956651041]}}, {"type": "Feature", "properties": {"id": "156", "info": "", "row": 17532.666015625, "col": 18041.5}, "geometry": {"type": "Point", "coordinates": [-85.56574672931384, 45.60482463320837, 229.9309956651041]}}, {"type": "Feature", "properties": {"id": "157", "info": "", "row": 19126.5, "col": 0.5}, "geometry": {"type": "Point", "coordinates": [-90.20716719088948, 45.86157135154452, 229.9309956651041]}}, {"type": "Feature", "properties": {"id": "158", "info": "", "row": 19126.5, "col": 1503.9166259765625}, "geometry": {"type": "Point", "coordinates": [-89.8239536605245, 45.82356660411861, 229.9309956651041]}}, {"type": "Feature", "properties": {"id": "159", "info": "", "row": 19126.5, "col": 3007.333251953125}, "geometry": {"type": "Point", "coordinates": [-89.44126930059376, 45.78428058393543, 229.9309956651041]}}, {"type": "Feature", "properties": {"id": "160", "info": "", "row": 19126.5, "col": 4510.75}, "geometry": {"type": "Point", "coordinates": [-89.059130369533, 45.74371683787392, 229.9309956651041]}}, {"type": "Feature", "properties": {"id": "161", "info": "", "row": 19126.5, "col": 6014.16650390625}, "geometry": {"type": "Point", "coordinates": [-88.67755293323314, 45.70187901785341, 229.9309956651041]}}, {"type": "Feature", "properties": {"id": "162", "info": "", "row": 19126.5, "col": 7517.5830078125}, "geometry": {"type": "Point", "coordinates": [-88.2965521185096, 45.658770794069085, 229.9309956651041]}}, {"type": "Feature", "properties": {"id": "163", "info": "", "row": 19126.5, "col": 9021.0}, "geometry": {"type": "Point", "coordinates": [-87.9161435961237, 45.61439601654877, 229.9309956651041]}}, {"type": "Feature", "properties": {"id": "164", "info": "", "row": 19126.5, "col": 10524.4169921875}, "geometry": {"type": "Point", "coordinates": [-87.53634258487406, 45.56875860572775, 229.9309956651041]}}, {"type": "Feature", "properties": {"id": "165", "info": "", "row": 19126.5, "col": 12027.833984375}, "geometry": {"type": "Point", "coordinates": [-87.15716409570048, 45.521862577639226, 229.9309956651041]}}, {"type": "Feature", "properties": {"id": "166", "info": "", "row": 19126.5, "col": 13531.2509765625}, "geometry": {"type": "Point", "coordinates": [-86.77862292812794, 45.47371204234437, 229.9309956651041]}}, {"type": "Feature", "properties": {"id": "167", "info": "", "row": 19126.5, "col": 15034.66796875}, "geometry": {"type": "Point", "coordinates": [-86.40073366687713, 45.42431120234256, 229.9309956651041]}}, {"type": "Feature", "properties": {"id": "168", "info": "", "row": 19126.5, "col": 16538.083984375}, "geometry": {"type": "Point", "coordinates": [-86.02351092349664, 45.37366438427191, 229.9309956651041]}}, {"type": "Feature", "properties": {"id": "169", "info": "", "row": 19126.5, "col": 18041.5}, "geometry": {"type": "Point", "coordinates": [-85.64696859864004, 45.321775939081306, 229.9309956651041]}}]}
array(0)
- pole(pole)<U2'HH' 'HV'
array(['HH', 'HV'], dtype='<U2')
- band_data(pole, band, y, x)float320.0 0.0 0.0 0.0 ... 0.0 0.0 0.0 0.0
- AREA_OR_POINT :
- Area
array([[[[0., 0., 0., ..., 0., 0., 0.], [0., 0., 0., ..., 0., 0., 0.], [0., 0., 0., ..., 0., 0., 0.], ..., [0., 0., 0., ..., 0., 0., 0.], [0., 0., 0., ..., 0., 0., 0.], [0., 0., 0., ..., 0., 0., 0.]]], [[[0., 0., 0., ..., 0., 0., 0.], [0., 0., 0., ..., 0., 0., 0.], [0., 0., 0., ..., 0., 0., 0.], ..., [0., 0., 0., ..., 0., 0., 0.], [0., 0., 0., ..., 0., 0., 0.], [0., 0., 0., ..., 0., 0., 0.]]]], dtype=float32)
<xarray.DatasetView> Size: 3GB Dimensions: (pole: 2, band: 1, y: 19127, x: 18042) Coordinates: * band (band) int64 8B 1 spatial_ref int64 8B 0 * pole (pole) <U2 16B 'HH' 'HV' Dimensions without coordinates: y, x Data variables: band_data (pole, band, y, x) float32 3GB 0.0 0.0 0.0 0.0 ... 0.0 0.0 0.0imagery- name :
- RCM_DS:/home1/scratch/agrouaze/xsardatasync/xsardata/RCM1_OK1050603_PK1050605_1_SC50MB_20200214_115905_HH_HV_Z010:
- short_name :
- RCM_DS:RCM1_OK1050603_PK1050605_1_SC50MB_20200214_115905_HH_HV_Z010:
- product :
- Z010
- safe :
- RCM1_OK1050603_PK1050605_1_SC50MB_20200214_115905_HH_HV_Z010
- swath :
- SC50MB
- multidataset :
- False
- copyright :
- RCM Data and Products (c) CSA, 2020 - All Rights Reserved.
- productId :
- 1050605_1
- documentIdentifier :
- RCM-SP-53-0419, Issue 2/5
- securityClassification :
- Non classifié / Unclassified
- pols :
- HH HV
- start_date :
- 2020-02-14 11:59:03.000000
- stop_date :
- 2020-02-14 12:00:02.000000
- footprint :
- POLYGON ((-84.63397773377159 48.71534850877886, -89.49513011173734 49.25784540666172, -90.20716719088948 45.86157135154452, -85.64696859864004 45.32177593908131, -84.63397773377159 48.71534850877886))
- coverage :
- 381km * 359km (line * sample )
- pixel_line_m :
- 20.0
- pixel_sample_m :
- 20.0
- approx_transform :
- |-0.00,-0.00,-84.71| |-0.00, 0.00, 48.73| | 0.00, 0.00, 1.00|
How to apply calibration?
All the operation below are already performed by default for GRD products. So, what is following is a simple explanation about how is made calibration.
Load digital numbers
load_digital_number is a function that allows to load digital numbers from tiff files at chosen resolution and return it as a DataArray. Resampling is made thanks to rasterio.open(tiff_file).read. For dual pol products, there is a tiff file for each pol. So that digital numbers are computed for both pol. Posting of lines and samples is computed thanks to Affine.translation and Affine.scale.
[15]:
import rasterio
#Define resampling method (here it is the root mean square from rasterio)
resampling = rasterio.enums.Resampling.rms
#Define the chunks size for line and samples
chunks = {'line': 5000, 'sample': 5000}
[16]:
dn_low_res = rcmds.load_digital_number(resolution=resolution, resampling=resampling, chunks=chunks)
dn_low_res
[16]:
<xarray.Dataset> Size: 556kB
Dimensions: (line: 382, sample: 360, pol: 2)
Coordinates:
* line (line) float64 3kB 24.5 74.5 124.5 ... 1.902e+04 1.907e+04
* sample (sample) float64 3kB 24.5 74.5 124.5 ... 1.792e+04 1.797e+04
* pol (pol) <U2 16B 'HH' 'HV'
Data variables:
digital_number (pol, line, sample) uint16 550kB dask.array<chunksize=(1, 382, 360), meta=np.ndarray>- line: 382
- sample: 360
- pol: 2
- line(line)float6424.5 74.5 ... 1.902e+04 1.907e+04
array([ 24.5, 74.5, 124.5, ..., 18974.5, 19024.5, 19074.5])
- sample(sample)float6424.5 74.5 ... 1.792e+04 1.797e+04
array([ 24.5, 74.5, 124.5, ..., 17874.5, 17924.5, 17974.5])
- pol(pol)<U2'HH' 'HV'
array(['HH', 'HV'], dtype='<U2')
- digital_number(pol, line, sample)uint16dask.array<chunksize=(1, 382, 360), meta=np.ndarray>
- comment :
- not denoised digital number, resampled at "1000m" with rasterio.enums.Resampling.rms
- history :
- digital_number: imagery/1050605_1_H*.tif
Array Chunk Bytes 537.19 kiB 268.59 kiB Shape (2, 382, 360) (1, 382, 360) Dask graph 2 chunks in 3 graph layers Data type uint16 numpy.ndarray
- linePandasIndex
PandasIndex(Index([ 24.5, 74.5, 124.5, 174.5, 224.5, 274.5, 324.5, 374.5, 424.5, 474.5, ... 18624.5, 18674.5, 18724.5, 18774.5, 18824.5, 18874.5, 18924.5, 18974.5, 19024.5, 19074.5], dtype='float64', name='line', length=382)) - samplePandasIndex
PandasIndex(Index([ 24.5, 74.5, 124.5, 174.5, 224.5, 274.5, 324.5, 374.5, 424.5, 474.5, ... 17524.5, 17574.5, 17624.5, 17674.5, 17724.5, 17774.5, 17824.5, 17874.5, 17924.5, 17974.5], dtype='float64', name='sample', length=360)) - polPandasIndex
PandasIndex(Index(['HH', 'HV'], dtype='object', name='pol'))
Get the raw normalized radar cross section
First the calibration look up tables are loaded at the good resolution in xsar.RcmDataset._luts thanks to the method lazy_load_luts. The resampling is made thanks to an interpolation with the method ̀xsar.RcmDataset._interpolate_var.
This last method uses RectBivariateSplinefor the interpolation, but it is necessary that data is expressed as a 2D vector. Here, calibration/noise look up tables and incidence are expressed as 1D vector (range sample). Consequently, we need to convert these in 2D (adding an azimuth dimension dependency) before applying the interpolation. Conversion is made thanks to numpy.tile, using the low resolution lines expressed in the geolocation grid part of the reader; reducing the
calculation. A template of a DataArray that uses the posting of digital numbers (with applied resolution) is given on this interpolation function so the result is now at the right resolution.
_apply_calibration_lut is a method that applies a calibration look up table to digital numbers to compute gamma0, beta0 and sigma0 (depending on the variable name passed in argument) and return the result as a DataArray. It applies the following formula :
Reference : RCM Image Product Format Definition (7.5.1)
Different resampling method were tried such as scipy.ndimage.gaussian_filter1d that had the convenience to accept 1d vectors. Data was computed with this function and the chosen posting was this of digital numbers. But in order to be homogenous with other operations made in xsar, we chose to keep the solution with RectBivariateSpline.
[17]:
sigma0_raw = rcmds._apply_calibration_lut('sigma0').sigma0_raw
sigma0_raw
[17]:
<xarray.DataArray 'sigma0_raw' (pol: 2, line: 382, sample: 360)> Size: 2MB
dask.array<where, shape=(2, 382, 360), dtype=float64, chunksize=(1, 382, 360), chunktype=numpy.ndarray>
Coordinates:
* line (line) float64 3kB 24.5 74.5 124.5 ... 1.902e+04 1.907e+04
* sample (sample) float64 3kB 24.5 74.5 124.5 ... 1.792e+04 1.797e+04
* pol (pol) <U2 16B 'HH' 'HV'
Attributes:
pixelFirstLutValue: 18041
stepSize: -23
numberOfValues: 786
offset: 0.0- pol: 2
- line: 382
- sample: 360
- dask.array<chunksize=(1, 382, 360), meta=np.ndarray>
Array Chunk Bytes 2.10 MiB 1.05 MiB Shape (2, 382, 360) (1, 382, 360) Dask graph 2 chunks in 20 graph layers Data type float64 numpy.ndarray - line(line)float6424.5 74.5 ... 1.902e+04 1.907e+04
array([ 24.5, 74.5, 124.5, ..., 18974.5, 19024.5, 19074.5])
- sample(sample)float6424.5 74.5 ... 1.792e+04 1.797e+04
array([ 24.5, 74.5, 124.5, ..., 17874.5, 17924.5, 17974.5])
- pol(pol)<U2'HH' 'HV'
array(['HH', 'HV'], dtype='<U2')
- linePandasIndex
PandasIndex(Index([ 24.5, 74.5, 124.5, 174.5, 224.5, 274.5, 324.5, 374.5, 424.5, 474.5, ... 18624.5, 18674.5, 18724.5, 18774.5, 18824.5, 18874.5, 18924.5, 18974.5, 19024.5, 19074.5], dtype='float64', name='line', length=382)) - samplePandasIndex
PandasIndex(Index([ 24.5, 74.5, 124.5, 174.5, 224.5, 274.5, 324.5, 374.5, 424.5, 474.5, ... 17524.5, 17574.5, 17624.5, 17674.5, 17724.5, 17774.5, 17824.5, 17874.5, 17924.5, 17974.5], dtype='float64', name='sample', length=360)) - polPandasIndex
PandasIndex(Index(['HH', 'HV'], dtype='object', name='pol'))
- pixelFirstLutValue :
- 18041
- stepSize :
- -23
- numberOfValues :
- 786
- offset :
- 0.0
[18]:
import matplotlib.pyplot as plt
[19]:
plt.figure(figsize=(13, 6))
plt.subplot(1, 2, 1)
sigma0_raw_cross = sigma0_raw.sel(pol='HV')
plt.pcolor(sigma0_raw_cross, vmax=0.02, cmap='Greys_r')
plt.title('sigma0_raw HV')
plt.xlabel('samples')
plt.ylabel('lines')
plt.colorbar()
plt.subplot(1, 2, 2)
sigma0_raw_co = sigma0_raw.sel(pol='HH')
plt.pcolor(sigma0_raw_co, vmax=0.7, cmap='Greys_r')
plt.title('sigma0_raw HH')
plt.xlabel('samples')
plt.ylabel('lines')
plt.colorbar()
[19]:
<matplotlib.colorbar.Colorbar at 0x74c23fde6f10>
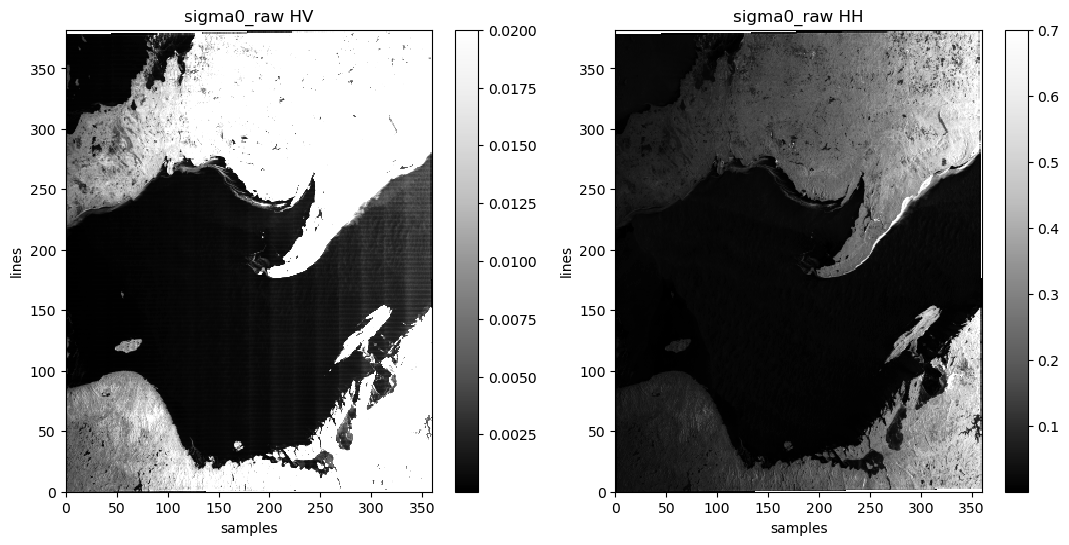
How to apply denoising ?
All the operation below are already performed by default for GRD products. So, what is following is a simple explanation about how is made denoising.
How to get the Noise Equivalent Sigma Zero ?
The noise look up tables are loaded at the good resolution in xsar.RcmDataset._noise_luts thanks to the method lazy_load_noise_luts. The resampling is made thanks to an interpolation with the method ̀xsar.RcmDataset._interpolate_var.
Notes: - noise luts are already calibrated so we don’t have to apply a calibration on these - interpolate_var method explained above converts the NoiseLevelValues in linear beacause these are expressed in dB in the reader. The formula used is :
[20]:
nesz_low_res = rcmds.lazy_load_noise_luts().sigma0
nesz_low_res
[20]:
<xarray.DataArray 'sigma0' (pol: 2, line: 382, sample: 360)> Size: 1MB
dask.array<concatenate, shape=(2, 382, 360), dtype=float32, chunksize=(1, 382, 360), chunktype=numpy.ndarray>
Coordinates:
* line (line) float64 3kB 24.5 74.5 ... 1.902e+04 1.907e+04
* sample (sample) float64 3kB 24.5 74.5 ... 1.792e+04 1.797e+04
pixelFirstNoiseValue int64 8B 18041
stepSize int64 8B -23
* pol (pol) <U2 16B 'HH' 'HV'- pol: 2
- line: 382
- sample: 360
- dask.array<chunksize=(1, 382, 360), meta=np.ndarray>
Array Chunk Bytes 1.05 MiB 537.19 kiB Shape (2, 382, 360) (1, 382, 360) Dask graph 2 chunks in 11 graph layers Data type float32 numpy.ndarray - line(line)float6424.5 74.5 ... 1.902e+04 1.907e+04
array([ 24.5, 74.5, 124.5, ..., 18974.5, 19024.5, 19074.5])
- sample(sample)float6424.5 74.5 ... 1.792e+04 1.797e+04
array([ 24.5, 74.5, 124.5, ..., 17874.5, 17924.5, 17974.5])
- pixelFirstNoiseValue()int6418041
array(18041)
- stepSize()int64-23
array(-23)
- pol(pol)<U2'HH' 'HV'
array(['HH', 'HV'], dtype='<U2')
- linePandasIndex
PandasIndex(Index([ 24.5, 74.5, 124.5, 174.5, 224.5, 274.5, 324.5, 374.5, 424.5, 474.5, ... 18624.5, 18674.5, 18724.5, 18774.5, 18824.5, 18874.5, 18924.5, 18974.5, 19024.5, 19074.5], dtype='float64', name='line', length=382)) - samplePandasIndex
PandasIndex(Index([ 24.5, 74.5, 124.5, 174.5, 224.5, 274.5, 324.5, 374.5, 424.5, 474.5, ... 17524.5, 17574.5, 17624.5, 17674.5, 17724.5, 17774.5, 17824.5, 17874.5, 17924.5, 17974.5], dtype='float64', name='sample', length=360)) - polPandasIndex
PandasIndex(Index(['HH', 'HV'], dtype='object', name='pol'))
[21]:
plt.pcolor(nesz_low_res.sel(pol='HH'), cmap='Greys_r')
plt.title('nesz (pol = HH)')
plt.xlabel('samples')
plt.ylabel('lines')
plt.colorbar()
[21]:
<matplotlib.colorbar.Colorbar at 0x74c23fa18490>
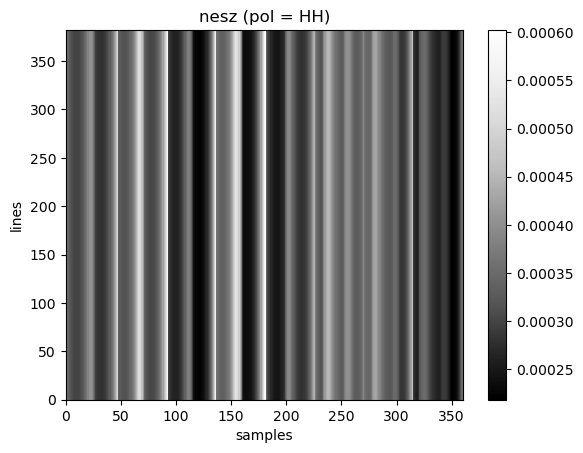
How to get the noise substracted Sigma0
Right now we only have to substract the noise_lut to the raw normalized radar cross section. It is made with the function _add_denoised, that add the variables to the RcmDataset.dataset
[22]:
sigma0 = sigma0_raw - nesz_low_res
sigma0
[22]:
<xarray.DataArray (pol: 2, line: 382, sample: 360)> Size: 2MB
dask.array<sub, shape=(2, 382, 360), dtype=float64, chunksize=(1, 382, 360), chunktype=numpy.ndarray>
Coordinates:
* line (line) float64 3kB 24.5 74.5 ... 1.902e+04 1.907e+04
* sample (sample) float64 3kB 24.5 74.5 ... 1.792e+04 1.797e+04
* pol (pol) <U2 16B 'HH' 'HV'
pixelFirstNoiseValue int64 8B 18041
stepSize int64 8B -23- pol: 2
- line: 382
- sample: 360
- dask.array<chunksize=(1, 382, 360), meta=np.ndarray>
Array Chunk Bytes 2.10 MiB 1.05 MiB Shape (2, 382, 360) (1, 382, 360) Dask graph 2 chunks in 31 graph layers Data type float64 numpy.ndarray - line(line)float6424.5 74.5 ... 1.902e+04 1.907e+04
array([ 24.5, 74.5, 124.5, ..., 18974.5, 19024.5, 19074.5])
- sample(sample)float6424.5 74.5 ... 1.792e+04 1.797e+04
array([ 24.5, 74.5, 124.5, ..., 17874.5, 17924.5, 17974.5])
- pol(pol)<U2'HH' 'HV'
array(['HH', 'HV'], dtype='<U2')
- pixelFirstNoiseValue()int6418041
array(18041)
- stepSize()int64-23
array(-23)
- linePandasIndex
PandasIndex(Index([ 24.5, 74.5, 124.5, 174.5, 224.5, 274.5, 324.5, 374.5, 424.5, 474.5, ... 18624.5, 18674.5, 18724.5, 18774.5, 18824.5, 18874.5, 18924.5, 18974.5, 19024.5, 19074.5], dtype='float64', name='line', length=382)) - samplePandasIndex
PandasIndex(Index([ 24.5, 74.5, 124.5, 174.5, 224.5, 274.5, 324.5, 374.5, 424.5, 474.5, ... 17524.5, 17574.5, 17624.5, 17674.5, 17724.5, 17774.5, 17824.5, 17874.5, 17924.5, 17974.5], dtype='float64', name='sample', length=360)) - polPandasIndex
PandasIndex(Index(['HH', 'HV'], dtype='object', name='pol'))
Comparison between noised sigma0 and noised substracted sigma0
[23]:
plt.figure(figsize=(26, 12))
sigma0_cross = sigma0.sel(pol='HV')
sigma0_co = sigma0.sel(pol='HH')
plt.subplot(2,2,1)
plt.pcolor(sigma0_raw_cross, vmax=0.02, cmap='Greys_r')
plt.title('Sigma0 HV with noise')
plt.xlabel('samples')
plt.ylabel('lines')
plt.colorbar()
plt.subplot(2,2,3)
plt.pcolor(sigma0_cross, vmax=0.02, cmap='Greys_r')
plt.title('Sigma0 HV without noise')
plt.xlabel('samples')
plt.ylabel('lines')
plt.colorbar()
plt.subplot(2,2,2)
plt.pcolor(sigma0_raw_co, vmax=0.7, cmap='Greys_r')
plt.title('Sigma0 HH with noise')
plt.xlabel('samples')
plt.ylabel('lines')
plt.colorbar()
plt.subplot(2,2,4)
plt.pcolor(sigma0_co, vmax=0.7, cmap='Greys_r')
plt.title('Sigma0 HH without noise')
plt.xlabel('samples')
plt.ylabel('lines')
plt.colorbar()
[23]:
<matplotlib.colorbar.Colorbar at 0x74c21fbdbf50>
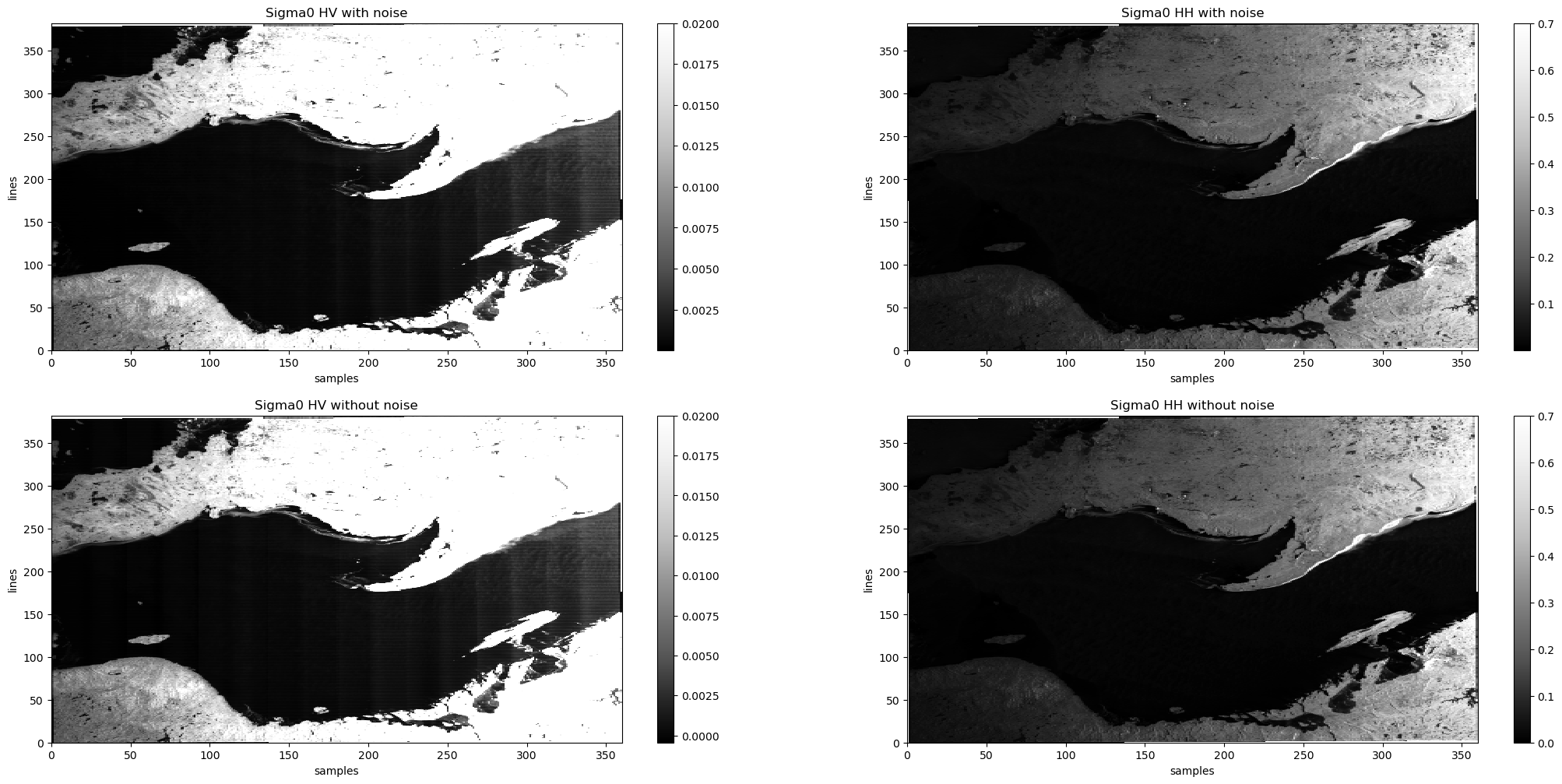
How to get the incidence ?
Such as noise/calibration look up tables, incidence depends on samples, which are expressed in the reader thanks to step, firstPixelValue and nbOfValues. Samples are computed in the meta class directly on the datatree thanks to the method assign_index.
_load_incidence_from_lut is a function that applies an interpolation with _interpolate_var and then return the incidence at the good resolution
[24]:
incidence = rcmds._load_incidence_from_lut()
incidence
[24]:
<xarray.DataArray "Delayed('RectBivariateSpline-9a031c3c-ab4f-421f-b5-a2d8ad4798bd5df4af75643ee52ef871" (
line: 382,
sample: 360)> Size: 550kB
dask.array<Delayed('RectBivariateSpline-9a031c3c-ab4f-421f-b5, shape=(382, 360), dtype=float32, chunksize=(382, 360), chunktype=numpy.ndarray>
Coordinates:
* line (line) float64 3kB 24.5 74.5 124.5 ... 1.902e+04 1.907e+04
* sample (sample) float64 3kB 24.5 74.5 124.5 ... 1.792e+04 1.797e+04- line: 382
- sample: 360
- dask.array<chunksize=(382, 360), meta=np.ndarray>
Array Chunk Bytes 537.19 kiB 537.19 kiB Shape (382, 360) (382, 360) Dask graph 1 chunks in 5 graph layers Data type float32 numpy.ndarray - line(line)float6424.5 74.5 ... 1.902e+04 1.907e+04
array([ 24.5, 74.5, 124.5, ..., 18974.5, 19024.5, 19074.5])
- sample(sample)float6424.5 74.5 ... 1.792e+04 1.797e+04
array([ 24.5, 74.5, 124.5, ..., 17874.5, 17924.5, 17974.5])
- linePandasIndex
PandasIndex(Index([ 24.5, 74.5, 124.5, 174.5, 224.5, 274.5, 324.5, 374.5, 424.5, 474.5, ... 18624.5, 18674.5, 18724.5, 18774.5, 18824.5, 18874.5, 18924.5, 18974.5, 19024.5, 19074.5], dtype='float64', name='line', length=382)) - samplePandasIndex
PandasIndex(Index([ 24.5, 74.5, 124.5, 174.5, 224.5, 274.5, 324.5, 374.5, 424.5, 474.5, ... 17524.5, 17574.5, 17624.5, 17674.5, 17724.5, 17774.5, 17824.5, 17874.5, 17924.5, 17974.5], dtype='float64', name='sample', length=360))
How to get the elevation ?
To get the incidence, we apply a formula :
2 variables give orbit altitude so we considered theSatelliteHeight (and not thealtitude).
RcmDataset._load_elevation_from_lut permit to calculate the elevation (in degrees).
[25]:
elevation = rcmds._load_elevation_from_lut()
elevation
[25]:
<xarray.DataArray (line: 382, sample: 360)> Size: 1MB dask.array<degrees, shape=(382, 360), dtype=float64, chunksize=(382, 360), chunktype=numpy.ndarray> Coordinates: * line (line) float64 3kB 24.5 74.5 124.5 ... 1.902e+04 1.907e+04 * sample (sample) float64 3kB 24.5 74.5 124.5 ... 1.792e+04 1.797e+04
- line: 382
- sample: 360
- dask.array<chunksize=(382, 360), meta=np.ndarray>
Array Chunk Bytes 1.05 MiB 1.05 MiB Shape (382, 360) (382, 360) Dask graph 1 chunks in 12 graph layers Data type float64 numpy.ndarray - line(line)float6424.5 74.5 ... 1.902e+04 1.907e+04
array([ 24.5, 74.5, 124.5, ..., 18974.5, 19024.5, 19074.5])
- sample(sample)float6424.5 74.5 ... 1.792e+04 1.797e+04
array([ 24.5, 74.5, 124.5, ..., 17874.5, 17924.5, 17974.5])
- linePandasIndex
PandasIndex(Index([ 24.5, 74.5, 124.5, 174.5, 224.5, 274.5, 324.5, 374.5, 424.5, 474.5, ... 18624.5, 18674.5, 18724.5, 18774.5, 18824.5, 18874.5, 18924.5, 18974.5, 19024.5, 19074.5], dtype='float64', name='line', length=382)) - samplePandasIndex
PandasIndex(Index([ 24.5, 74.5, 124.5, 174.5, 224.5, 274.5, 324.5, 374.5, 424.5, 474.5, ... 17524.5, 17574.5, 17624.5, 17674.5, 17724.5, 17774.5, 17824.5, 17874.5, 17924.5, 17974.5], dtype='float64', name='sample', length=360))